�l���r�g��2022-03-17���ٷ��Ӌ��C�QՓ���g�[��1��
ժ Ҫ�� ժ Ҫ���C��ҕ�X�ǽ�����Ӌ��Cҕ�X��Փ���̻����A�ϵ�һ�T�W�ƣ��漰����W����ҕ�X��Ϣ̎�����˹������Լ��C�һ�w�������P���g���S���҇�����I���D�������c���P�о��IJ������룬�C��ҕ�X���g�{���侫�ȸߡ����r�ԏ����Ԅӻ��c���ܻ��̶ȸߵȃ��c���ɞ��������C��
����ժ Ҫ���C��ҕ�X�ǽ�����Ӌ��Cҕ�X��Փ���̻����A�ϵ�һ�T�W�ƣ��漰����W����ҕ�X��Ϣ̎�����˹������Լ��C�һ�w�������P���g���S���҇�����I���D�������c���P�о��IJ������룬�C��ҕ�X���g�{���侫�ȸߡ����r�ԏ����Ԅӻ��c���ܻ��̶ȸߵȃ��c���ɞ��������C�������ܻ�����Ҫ����֮һ�������V�������ڹ��I���a���r�I�Լ�܊�µȸ����I���ڏV��������P�īI֮��ᘌ���ʮ�����C��ҕ�X���P���g�İlչ�c�����M�з����c���Y��ּ�ڞ��о��W���c���̑����ˆT�ṩ���������ȣ����Y�˙C��ҕ�X���g�İlչ�v�̡�������ęC��ҕ�X�lչ�F��;��Σ����c�����˙C��ҕ�Xϵ�y�ĺ��ĽM�ɲ���������ҕ�X̎���㷨�Լ���ǰ�����ęC��ҕ�X���Iܛ��;Ȼ��B�˙C��ҕ�X���g�ڮaƷ覴Ùz�y������ҕ�l�O�ط������Ԅ��{��c�o���{��c�t��Ӱ���\��� 4 �������I��đ���;�������ˮ�ǰ�C��ҕ�X���g�����R�����𣬲�����δ���İlչڅ���M����չ������C��ҕ�X���g�İlչ�͑����ƏV�l�]�e�O���á�
�����P �I �~���C��ҕ�X;����ϵ�y;ҕ�X̎���㷨;ҕ�Xܛ��;�����c�lչڅ��
������������S���F������I�a�I�Y���{�����D�������IJ������룬Խ��Խ����I�_ʼʩ��“�C���Q��”��ʹ�ÙC��������܇�����������պ��졢��������ʳƷ���I��õ���Խ��Խ�V���đ��ã������������P�a�I�İlչ���C������һ�N���Cе�����С��R�e���Q���c���Ƶȶ�N���M���g��һ���������в��������������Ԅӻ��O����b��[1]�����Q��“����I�ʹ�픶˵�����”�������������lչ����ҕ�̶��c�վ������C���˼��g���䑪���ѳɞ鮔��Ƽ��ͮa�I�lչ��“�ؠ�֮��”��������Ҫ�đ������x��
��������C���˵�“�۾�”���C��ҕ�Xϵ�y��һ�N������W�b�úͷǽ��|�Ă������@�ñ��z�y���w�������D��ͨ�^Ӌ��C�ĈD������ȡ��Ϣ���M�з���̎�����M�����F�z�y�Ϳ��Ƶ��b�á��C��ҕ�Xϵ�y���Ќ��r�Ժá���λ���ȸߵȃ��c������Ч�����әC���˵��`�����c���ܻ��̶�[2]���nj��F���I�Ԅӻ������ܻ�����Ҫ�ֶ�֮һ���S������g�IJ������ƣ��Լ�����a�I�и��|���aƷ���������࣬�C��ҕ�X�����_ʼ��Ҫ���ڹ��I����b��ȱ�ݙz�y[3-4]�������õ���܇����[5]��ʳƷ�O��[6-7]��ҕ�X����[8-9]����ͨ[10-11]��܊��[12]�������ӹ�[13]�ȶ����I��[14-15]���Ј�Ҏģ�����U����ˣ��о��C��ҕ�X���P���g���������I���ܙC���˵Įa�I�lչ������Ҫ���x��
����������Ҫ���C��ҕ�X�İlչ�vʷ���о��F����P���ļ��g���䑪���M�п��Y�c����������δ���lչڅ������չ����
����1 �C��ҕ�X�lչ�F��
����1.1 �C��ҕ�X�lչʷ
�����C��ҕ�X�ǽ�����Ӌ��Cҕ�X��Փ���̻����A�ϵ�һ�T�W�ƣ��漰����W����ҕ�X��Ϣ̎�����˹������Լ��C�һ�w�������P���g[16]�����v�ˏĶ��S�����S���ݻ��^�̡��C��ҕ�X�lչ�� 20 ���o 50 ��������S�D���R�e�c������о��������ַ��R�e����������ȱ�ݙz�y�����ՈD����g�ȡ�60 �������ʡ�����WԺ ROBERTS[17]������������w�Ķ��S�D����֏ͳ��T�������w�����w�����Sģ��(�珗��ģ���c�V�x�A���wģ�͵�)�Լ��������g�Pϵ�������_�����������S������������wҕ�X�о���70 �����ʡ�����WԺ MARR[18]����ϵ�y����ҕ�X��Ϣ̎����Փ��ָ�����ҕ�X�����S��������ȡ���^�y��������Ϣ���^����Ҫ���^���Ӵε�̎���������@�N̎���^�̿�����Ӌ��ķ�ʽ�جF���Ķ��춨��Ӌ��Cҕ�X��Փ����ģʽ���Ļ��A���˺�Ӌ��Cҕ�X���g�� 80 ����M��������lչ�ĕr�ڣ�����ҕ�X���µĸ�������c��Փ����ӿ�F���c��ͬ�r���S�� CCD �D���������CPU �c DSP ��Ӳ���c�D��̎�����g���w�ٰlչ[19]��Ӌ��Cҕ�X�Č������Փ�о��D�I�I������P���g���ã��Ķ��a���˙C��ҕ�X�����ھ��Ќ��r�Ժá���λ�����c���ܻ��̶ȸߵ����c���C��ҕ�X�ѽ���������܇[9]�����[20-21]���tˎ[22]��ʳƷ[23-24]���r�I���I��õ��ˏV���đ���[25-27]����ռ�C��ҕ�X�Ј����� 40%~50%�İ댧�w�����ИI�������εľ��A�ӹ��и�߾��� PCB ��λ���� SMT Ԫ�����õ�����ȱ�ݙz�y�ȶ���ه�߾��ȵęC��ҕ�X�����c��λ��
����1.2 ����C��ҕ�X�F��
�����C��ҕ�X���ڰlչ�ښW�����ձ��ȇ��ң����Q�����S�������ęC��ҕ�X���P�a�I��˾��������Դ�������ձ� Moritex;�R�^�S������ Navitar���� Schneider���� Zeiss���ձ� Computar ��;���I���C�S�ҵ� AVT������ DALSA���ձ� JAI����Basler����ʿ AOS���� Optronis;ҕ�X����ܛ���S�ҵ� MVTec����������ҕ(Cognex)�����ô� Adept �ȣ��Լ��������S���ձ�����(Panasonic)�c����ʿ(Keyence)�������T�ӡ��Wķ��(Omron)���~˼��(Microscan)�ȡ��M�ܽ� 10 ���ȫ��a�I���Ї��D�ƣ����W���Ȱl�_�����ڙC��ҕ�X���P���g����̎�ڽy�ε�λ���������� Cognex �c�ձ� Keyence ���Ŕ���ȫ�� 50%���ϵ��Ј����~��ȫ��C��ҕ�X�ИI�ʬF�ɏ����Š�B�����T������I 4.0 ���ԡ������ٹ��I�����I���W���ԡ��ձ��C�������ԡ��W��“��”Ӌ���ȑ����cӋ���Լ����P���ߵ�֧���£��l�_�����c�^�ęC��ҕ�X���g�����^�߰����Mһ���U���ˇ��H�C��ҕ�X�Ј���Ҏģ����D 1 ��ʾ���� 2018 �꣬�C��ҕ�Xϵ�y��ȫ���Ј�Ҏģ�ӽ� 80 �|��Ԫ��������L�ʳ��^15.0%���������ęC��ҕ�X�Ј�——���Ј�����Ҏģ�� 27.1 �|��Ԫ��ռ�ȳ��^ȫ����������֮һ��
����1.3 ���șC��ҕ�X�F��
������Ȱl�_���ң��҇�ֱ�� 90 ����������ٔ���ҕ�X���g��˾���������Pҕ�X�aƷ��Ҫ������ý�w̎��������ȱ�ݙz�y�Լ�܇���R�e�ȡ��������Ј�����ͬ�r�aƷ��������ܛӲ�����܆�һ���ɿ����^��Ȇ��}��ֱ�� 1998 ���_ʼ���҇��C��ҕ�X���lչ��������lչ���v�ˆ��ɡ��lչ���ڡ��lչ���ں��ٰlչ���A��[28]��
�����C��ҕ�X�����A�Σ��� 1998 ���_ʼ���S�����Y������������P��I�ڴ��Ͷ�Y���S����I������Ҫ�õ������C��ҕ�X���P���g��֧�֣�һЩ�Ԅӻ���˾�_ʼ���Ї���ҕ�XܛӲ���aƷ����Ό��õ�ҕ�X����ϵ�y��������������ͼӏ��Ї��͑C��ҕ�X���g�ͮaƷ��������J֪���������P�a�I�ˆTչ�Fҕ�X���g���o�Ԅӻ��a�I�Ī��rֵ�͏V������ǰ�����Ķ����әC��ҕ�X����ӡ��طNӡˢ���ИI�ďV������[29]��
�����C��ҕ�X�lչ�����A�Σ��� 2002 �굽 2007 �����g��Խ��Խ�����I�_ʼᘌ����Ե������һ��ڙC��ҕ�X�Ľ�Q�������Լ�̽���c�аl��������֪�R�a��ęC��ҕ�XܛӲ���O�䣬�� USB2.0 �ӿڵ����C�Ͳɼ������������棬��uռ�������T���Ј�;ͬ�r���T��z�y�c��λ��Ӌ��[30]������ȱ�ݙz�y[31]�ȑ����cϵ�y���ɷ���ȡ�����P�I��ͻ�ơ��S���������a��������D���Լ��˂��������L�ĮaƷƷ�|�����Ⱥܶ����y�a�I����[32- 33]���r����ּ�[34-35]������[36]���ИI�_ʼ�Lԇ��ҕ�X���gȡ���˹��������|����Ч�ʡ�
�����C��ҕ�X�lչ�����A�Σ��� 2008 �굽 2012 �����g�����F���S�����¹��I���C���R�^����Դ���D��̎��ܛ���Ⱥ��ĮaƷ�аl�ďS�̣������Ї�����ĮaƷ�����Ј������P��I�ęC��ҕ�X�aƷ�OӋ���_�l�c�����������ڲ������`��Ҳ�õ���������ͬ�r���C��ҕ�X���r�I[37]����ˎ[38]������[39]�ȶ��ИI�õ���ȏV���ؑ��ã����B��һ����ϵ�y�����P���g�ˆT��
�����C��ҕ�X���ٰlչ�A�Σ���������҇��Ⱥ���_�˴��M�������졢���ܙC����ҕ�Xϵ�y�Լ����ܙz�y�lչ�������ļ������Ї����� 2025�������ʩ���쏊�����Ƅ��Ї��� 2025 ��������F���I�����~�����쏊������;���߶������������Є�Ӌ�� (2018—2020 ��)������Ї����ܙz�y���g�� 2020 ��Ҫ�_�����H���Mˮƽ�����������P���ߵķ��ֺ��������҇��C��ҕ�X�ИI��Ͷ���c�a���@�����L���Ј�Ҏģ���ٔU���߹��a�I�C�����о��� (GGII)�yӋ��2017 ���Ї��C��ҕ�X�Ј�Ҏģ�_�� 70 �|Ԫ��ͬ�����ٳ� 25%���������������I�����٣���D 2 ��ʾ���AӋ�� 2020 ���Ј�Ҏģ�����^ 120 �|Ԫ��ͬ�r�҇��C��ҕ�X����u����I���ИI�����ӴΑ������죬Ŀǰ�҇��C��ҕ�X��I�ѳ� 100 ��ң������A�Ƽ������D���̜�����ҕ���ƏĿƼ���;�C��ҕ�X���P�aƷ�����̳��^ 200 �ң���V�ݼ�㑹��I��ҕ�D���;ϵ�y�����̳��^ 50 �ң�����D�����ƹ��ӵȣ��aƷ���w�ij���ҕ�X̎���c���������a�I朣����w��ҕ�X���óʬF�ٻ��R�ŵ���ʢ��B��
����Ȼ�����M��Ŀǰ�҇��C��ҕ�X�a�Iȡ�����w�ٰlչ�������w���f�����Ϳ����˾ռ�����ИI�rֵ朵�픶ˣ������^�鷀�����Ј����~������ˮƽ;�҇��C��ҕ�X��˾Ҏģ�^С���������Ї��C��ҕ�Xϵ�y������̣�����¼oԪ�Ƽ�ֻռ�� 1.4% ��ȫ���Ј����~;�c���� Cognex���ձ� Keyence �ȴ���I��ȣ��S����A���g����������D�������оƬ���߶��R�^����ȫ����ه�M�ڣ�������I��Ҫ�ԮaƷ������ϵ�y���ɡ��O�����졢�Լ��όӶ��Α����_�l���������_�l���^�٣��aƷ�����Բ�����̎���еͶ��Ј�������ˮƽƫ�͡�
����2 �C��ҕ�X�M���c�P�I���g
����һ����f���C��ҕ�Xϵ�y������W����������ϵ�y��ҕ�X��Ϣ̎�����P�I�M�ɲ���[40]��
����2.1 ����ϵ�y
��������ϵ�y��������Ҫ�nj��ⲿ���Ժ��m�ķ�ʽ���䵽���yĿ�����w��ͻ���D����ض��������������ⲿ�ɔ_�ȣ��Ķ����F�D����Ŀ���c��������ѷ��x�����ϵ�y�z�y�����c�\��Ч�ʡ�����Ӱ�����ϵ�y�����؏��s��׃��Ŀǰ�]�����m�ęC��ҕ�X����������������Ҫᘌ����w�đ��íh���������]���z�yĿ���c�����Ĺⷴ���c��ݔ���ԅ^�e�����x�������x����m�Ĺ�Դ��͡����䷽ʽ����Դ�ɫ[41]���OӋ���w���������������_��Ŀ���c��������ѷָ�Ч����
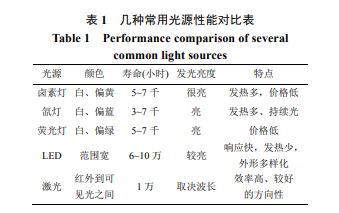
�����C��ҕ�X��Դ��Ҫ�����u�؟����ɹ����믟��� LED�����⡢�t�⡢X �侀�ȡ����У��u�؟���믟����Ќ����l�V�����������������ڟ�ݗ���Դ���l��࣬���������^��;�ɹ����ښ��w��늹�Դ���l�������^�ͣ��{ɫ�����^������ LED �l���ǰ댧�w�Ȳ�������w�ƣ��a���İl�⣬���ڹ̑B늹�Դ���l���^�̲��a���ᣬ���й��ĵ͡������L���l���١��������ɲ�ͬ���εȃ��c��LED ��Դ�ѳɞ��˙C��ҕ�X�����x��Դ�����t���Դ�c X �侀��Դ�����I���^���һ;���N��Դ���܌���Ҋ�� 1[41]��
�����Ĺ�Դ�Π�Ƕȷ��������Դ�ɷ֞�l�Ρ���Ρ��h�Ρ�ͬ�S�Լ����Ƶȹ�Դ���Ĺ�Դ���䷽ʽ�Ϸ֣�����ϵ�y�ɷ֞���/������ǰ�����Y���⡢��Ƕ������c�l�W������[40,42]�����У����������Ĺ�Դλ���^�ߣ�ʹ�ôֹ⾀������M�������C;��֮�������������õͽǶ����䷽ʽʹ�ù⾀��������M�������C������ߌ����氼���F�������������������ڹ⻬������֙C����������Ƭ�ȱ��愝�ۙz��;���������DZ��y�����ڹ�Դ�����C֮�g�ԫ@ȡ�^�ߌ��ȶȵĈD�����ڷ������w��݆���������w�ȵĮ���[38];��Ƕ�����t���ò�ͬ�Ƕȹ��շ�ʽ������ȡ���S��Ϣ�����·�庸��ȱ�ݙz�y�������ö�Ƕ������ AOI ��Դ����߳����|��[4]�����Y���������nj������ͶӰ�x�a���Ĺ��Ͷ�䵽���y������ϣ�Ȼ�����ͶӰ�D���a���Ļ�׃�̶ȁ��ؽ������w�����S��Ϣ��
�������⣬��Դ�ɫ�����D�ȶȮa���@��Ӱ푣�һ����f�����LԽ�̣����Ծ�Խ������֮�t�Uɢ��Խ�á���˹�Դ�x����Ҫ���]��Դ���L���ԣ���tɫ��Դ�����ڰ��������w�z�y���� 2 �o���˲�ͬ�ɫ��Դ�����c���ȼ��䑪�È���[43-44]���� VRIESENGA ��[45]���ÿ��ƹ�Դ���ɫ�����ƈD��Č��ȶȡ�ͬ�r����Դ���D��Ҫ���]��Դ�c���w��ɫ���ԣ�ͨ�^�x��ɫ�h���������Ļ��a�ɫ�����Ŀ���c�����g���ɫ���ȶ�[41-42]�����aɫ�h�D��D 3 ��ʾ����ˣ��ڌ��H�����У��迼�]��Դ�c���w�ɫ���P�ԣ��x����m�Ĺ�Դ���^�V���ɔ_���猦��ij�ض��ɫ�ı������������c�����ɫ�����Դ����߱��������ȣ��Ը��ƈD�ȶ�[43-44]��
����2.2 ����ϵ�y
��������ϵ�y�ǙC����ҕ�X��֪ϵ�y�е�“ҕ”���֣������R�^�����I���C�c�D��ɼ��������P�O��@ȡ���^�yĿ�˵ĸ��|���D�����͵����ÈD��̎��ϵ�y�M��̎����
�������P֪�R���]��Ӌ��Cҕ�X�D��̎��Փ����ô�l��ei�ڿ�
�����R�^�ஔ�����۾��ľ����w���������nj�����Ŀ�˵Ĺ�ݗ��۽������CоƬ�Ĺ�������ϡ��R�^���յ�Ч����ɷ֞�V���R�^���н����R�^���L�����R�^;�����ܿɷ֞�׃�����R�^���������R�^������Ȧ�R�^�ȡ��R�^���|��ֱ��Ӱ푵��@ȡ�D��������ȡ���׃�̶ȵȣ�������ϵ�y�@ȡ�ĈD����Ϣ���ڇ��ؓpʧ�������ں���ĭh�����y�Ի֏ͣ���˺����x���R�^�ǙC��ҕ�X�г����·�OӋ����Ҫ�h����
�����R�^�x��r��Ҫ���]�R�^���ࡢҕҰ���������x����׃[46]���sɢ�����Ƶ����أ��xȡ���m�Ľ��ౣ�C���z�����ľ��к��m�Ĵ�С�����ҳ����׃С��
�������I���C�nj���ݗ���D׃��ģ�M/������̖���O�䣬ͨ����������D�Q������·���D��ݔ���ӿڵȲ��������������͵ķ�ʽ��ͬ�����C���Է֞� CCD ���C�c CMOS ���C 2 ����У�CCD �����|���ã������칤ˇ�������s���ɱ��^�ߣ��� CMOS �Դ�������ͣ������xȡ�졣���Ղ������ĽY�����Բ�ͬ�����I���C�ɷ֞����ʽ�c���ʽ 2 �������C����һ�Ϋ@�������D�y���D��ֱ�^���䑪�����^�V�����������a���g���Ƽs������ꇺ��y�M�㹤�I�B�m�����Ҫ������Cÿ�γ���ֻ�ܫ@��һ�ЈD����Ϣ�������Ҫ���C���Ĕz���w�������Cֱ���Ƅӣ���Β���@�������ĈD������C���зֱ��ʸߵ����c�������ڗl�Ͳ���粼ƥ��䓰塢�����șz�y��������Β�����Ҫ�M������ֱ���Ƅӣ�����ϵ�y���s�Ժͳɱ��������ӡ�
�������C�x����Ҫ���]����D�Q����ģʽ��푑��ٶȡ�ҕҰ������ϵ�y���ȵ����ء����⣬���ڹ��I�OӋ������ʹ�ù��Iģ�M���C�r��횲��ÈD��ɼ������ɼ�����̖�D�Q�锵�ֈD���M�Ђ�ݔ�惦����ˣ��D��ɼ�����Ҫ�c���C�f�{�����팍�r��ɈD���ĸ��ٲɼ��c�xȡ���΄գ�ᘌ���ͬ��͵����C���� USB��PCI��PCI64��ISA �Ȳ�ͬ�Ŀ�����ʽ�ĈD��ɼ�����
����2.3 ҕ�X��Ϣ̎��
����ҕ�X��Ϣ̎���䮔�˙C��ҕ�X��“���X”���֣������C�ɼ��ĈD���M��̎���������F���ض�Ŀ�˵ęz�y�������c�R�e�������������Q�ߣ��ǙC��ҕ�Xϵ�y��“�X”���֡�ҕ�X��Ϣ̎��һ������D���A̎�����D��λ�c�ָ������ȡ��ģʽ����Z�x����ȌӴ�[3]��
����2.3.1 �D���A̎��D���A̎��
����������Ҫ�������C�˶���ȥ�롢����������cƴ�ӡ��ںϵȲ�������߈D���|�������ͺ��m̎���y�ȡ����C�˶�ּ��������C�ăȅ� (���࣬��׃ϵ��)���Ⅲ(���D��ꇺ�ƽ������)���ṩ���w����ij�c�����S��λ���c���ڈD���Ќ����c֮�g���_�����Pϵ���˶����ȸߵ�ֱ��Ӱ푵��C��ҕ�X��λ�ľ���[47-48]�����Ø˶��������������ј˶���[49]���Ԙ˶���[48]�ȡ�ͬ�r�����ڸ��N늴ŵȸɔ_���@ȡ�ĈD���н��}����˹�ȶ�N�������ȶȵͣ��������\��ģ���ȬF�������Ҫ���D��ȥ���Y�������Ը��ƈD���|�������У�ȥ�뷽��һ��ɷ֞���g���c׃�Q��ȥ�� 2 ���[50]���������ĈD��������������ֱ���D���⻯���D���J����ҕ�Xģ���������\��ģ��ȥ���ȷ�����ͬ�r������ҕҰ�������ơ�����ģʽ�IJ�ͬ����Ҫ�����a���ϲ�ͬλ�ë@ȡ�Ķ�ģ��ͬģ�B�D���M����ʣ��ٌ��F����D��ƴ�ӻ��ں�̎�����D�����һ��֞���ڈD��Ҷȵ���ʷ����c���ڈD����������ʷ���[51-52]�����ڻҶȵ���ʷ���ֱ�Ӳ��Úwһ���Ļ����P������Ϣ�������Զ���������Ӌ��D��Ҷ�ֵ֮�g�������ԣ����_���D���g����ʅ�������������Ρ���ʾ��ȸߣ������D��Ҷ�׃�������D��׃���Լ��ړ����^���У�Ӌ����s�ȸߡ�������Ҫ���ø��N�������ԡ�������������ʷ������ȏĈD����ȡ���N�c�������^���������Ȼ���M�п��g�s����׃����ƥ��õ������g��ƥ���Pϵ���M����Ӌ���D��֮�g׃�Q�Pϵ�������Ӌ���ٶȿ죬����ه��������ȡ������������^���У���Ҫ������S���g���C��ҕ�Xϵ�y�����ý�������С�������Լ����N�������ԁ�pС���Ӌ�������ڈD����ʵĻ��A�ϣ���Щ���I���a���茦��Դ�D���M���ںϣ����C���ԱM������ȡ������Ϣ����ȥ�������ɔ_��Ϣ�����^�ٵ�Ӌ����r��ǰ���¸�Ч���ÈD���YԴ��������Ӌ��C���g���ȺͿɿ���[53]�������D������ӴεIJ�ͬ���D���ںϿɷ֞����ؼ��ں�[54]���������ںϺ͛Q���ں�[35,55-56] 3 ���Ӵε��ںϣ�ͨ�^�ںϼ��g�������ҕ�XĿ�˙z�y���R�e�c���ɔ_������
����2.3.2 �D��λ�c�ָ�
�����D��λ�c�ָ���Ҫ����Ŀ��߅�硢���Π�����������֪�R�_�����z�yĿ�˵�λ�û�ĈD���зָ��Ŀ�ˣ��Ǵ_��Ŀ��λ�á���С���������Ϣ����Ҫ�ֶΡ�
�����D��λ���ÈD��ҶȻ�������Ϣ���_���D���б��z�y���w��λ�á���С�����D�Ƕȵȣ���Ҫ����ģ��ƥ�䷽�����F[57-58]����ͨ�^Ӌ��ģ��D�� (ͨ���DZ��z�y���w�D��)�ʹ������D��������Զ�����Ȼ���������Զ���ֵ������С������ƥ��λ�ü���Ŀ��λ�á�ģ��ƥ������ٶȿ졢��λ���ȸߡ����εȃ��c[59]����ҕ�X��λ�c�����еõ��ˏV�����á�������Ҫ�o�����z�y���w�ĈD�����ģ��ƥ�䶨λ����ֻ�m���ڱ������Ρ������̶������w���y�����ڲ�Ҏ�t�Π����w�Ķ�λ��
�����D��ָ��Ǹ���Ŀ�˼��������Ԍ��D�֞�������Ъ��،��Եķ��دB�^���M���_��Ŀ��λ�á��^���С���D��ָ��һ����Է֞飺
����(1) �ֵ�ָ�������Ȍ��D�����ػҶȷֲ������M�з�����Ȼ��������֪�R�� Otsu[60]�ȷ����_����Ҷ��ֵ���D��ָ� 2 ��������ֲ��^��ԓ�������θ�Ч���m���ڴ��z�yĿ���c�����������@�����r��
����(2) �^��ָ�������Å^��ȈD������(���ɫ���y����)���о����Ի������Ԍ����ؼ������팍�F�D��ָ�����^�����L[61]�����Ѻϲ�����ˮ�X[62]���㷨��������܉�̎���^����s�D��Ӌ�������ҷN���c���xȡ�c�����Kֹ�l�����O������Ӱ푷ָ�Y�����������ܕ��Ɖą^��߅�硣
����(3) ����߅���ķָ��[63]��ԓ�������ò�ͬ�D��^����߅��̎�����@�Ҷ���׃���B�m���ҵ�Ŀ�˅^���߅���팍�F�D��ָ���ڲ��B�m�Գ�ͨ�^���팍�F�����ԓ����m���������^С�ĈD�������Ƕ��A�����ӌ���ʮ�����С�
����(4) ���ڈD�ķָ���������DՓ��˼�룬�����ָ�D���D�Q�鎧���o��D������ÿһ�����ؼ���D�е�һ�����c�����D��ָ�}�D����D��c�Ę�ע���}����������С�����ʄt��D��[64]���S�C����[65]�Ȍ��F�D�����ѷָ�[66]��ԓ���������^�õطָ�D��Ӌ����s�ȸߡ�
����(5) �����W�j���Z�x�ָ��[67]��ģ�M���֪�^�̣��������}�_����W�j�ȷ���[68] ��̎����s�ķǾ��Ԇ��}�����������ȌW�����g�ڈD���Z�x�ָ��I��õ��������о���������� FCN[69]��DeepLab[70]��Mask R-CNN[71]��U-Net[72] �ȷָ��㷨�������Ԅ��{�[71]��Ӱ���\��[72]���I��õ����á�ԓ����m�����^�����܉��ָ�^����䲻ͬ�Ę˺��������ڌW���^�̏��s��Ӌ�������ȱ�c��
����2.3.3 �D��������ȡ
�����D���R�e������ȡ�Π��e���Ҷȡ��y��������[73-74]��Ȼ�����ģʽ�R�e�ȷ�����ģʽƥ��[57]��֧�������C����ȌW��[75]�ȁ팍�FĿ�˷��ȱ�ݙz�y�ȹ��ܣ��M�㹤�I�C��ҕ�X��ͬ�đ���������ˣ��D��������ȡ�ܴ�̶���Ӱ푈D���R�e�Y����
�����D��������ȡ�ɿ�����ĈD������ȡ�P�I���õ;S������Ϣ���^�̣���ʹ�@ȡ�ĵ;S���������܉���Ч������Ŀ�ˣ������Cͬ�Ŀ�˾����^С��Ⱦ����ͬ�Ŀ�˾����^�����g�ࡣ��Ч��������ȡ����ߺ��mĿ���R�e�����c�����ԣ�����Ӌ����s�ȡ����õĶ��S�D�������������Π��������y���������ɫ�����ȡ�
����(1) �y������[76-77]���������w����Y�������Լ��؏ͳ��F�ľֲ�ģʽ�������w�����ͬ�|�ԣ�����ه���ɫ�����ȣ����оֲ����cȫ���ԣ������D�c�������С��y��������ȡ���������нyӋ����Ҷȹ������[78]���ֲ���ֵģʽ(LBP)[79]��Gabor �V����[80]��С��׃�Q[81]�ȡ�
����(2) �Π������������H��ȡ݆���������Π�^��IJ�ͬ���Π������ɼ��֞�݆���Π�[82]�c�^���Π� 2 �[83-84]��
����݆���Π��nj�Ŀ�˅^��İ���߅���M������������������������߅�������������Ύ�����������׃�Q��(�縵���~������[85]��С��������)�����ʳ߶ȿ��g(CSS)[86]������׃�Q[87]�ȷ�����݆������������С����������Ϣ�^�࣬����Ч�p��Ӌ����;��݆����������������׃���У����y����ȡ������݆����Ϣ��
�����^���Π�������ᘌ�Ŀ��݆���������ą^���е��������ػҶ�ֵ�����ݶȼ�����������Ҫ�Ў�����(����e���|�ġ���ɢ�ȵ�)���ؓ�Y������(��W����[88])��������(�� Hu ��׃��[89]�� Zernike ��[90-91])���ݶȷֲ�����(�� HOG[92]�� SIFT[93]��)��
����(3) �ɫ����[94]�����������D����������������^���ԣ������֪�ͅ^�ֲ�ͬ���w�Ļ���ҕ�X����֮һ�����ɫ���D��ƽ�ơ����D�c�߶�׃�������^���������ԡ��ɫ���gģ����Ҫ�� HSV[94]�� RGB��HSI��CHL��LAB��CMY �ȡ����õ��ɫ�����ı��������������ɫֱ���D[91,95]���ɫ���P�D[96]���ɫ��[97]���ɫ�ۺ�����[98]�ȡ�
����2.3.4 ģʽ���
����ģʽ����|����ͨ�^����һ�������������Ĕ���������ȡ�ĈD������ӳ�䵽ijһ���o����e�У��Ķ����FĿ�˷���c�R�e��������Ę�������ֱ��Ӱ푵����R�e�����wЧ�ʣ�Ҳ��ģʽ�R�e���о����ġ�ģʽ��ɷ֞�yӋģʽ�R�e���Y��ģʽ�R�e���W�j�Լ���ȌW������Ҫ������������rҊ�� 3��
�����yӋģʽ�R�e�Y���˽yӋ���ʵ�ؐ�~˹�Q����Փ�Ԍ�ģʽ�M�нyӋ�������Ҫ������ؐ�~˹[99]�� Fisher �����[100]��֧�������C[91]��Boosting[101]�ȣ��yӋģʽ�R�e��Փ���ƣ���ȡ���˲��ّ��óɹ�������������ģʽ�����ĽY���Pϵ���Y��ģʽ�R�e (�ַQ�䷨ģʽ�R�e)���Ȍ�һ��ģʽ�ֽ������^���ε���ģʽ���քe�R�e��ģʽ����K����ģʽ�c��ģʽ�ӽY���Ę����Ϣ�����K�R�e�������Y��ģʽ�R�e��Փ�������ڝh���R�e������Ч�^�����Ɲh�֣������w׃�����m���ԏ��������ɔ_�������ˣ��ܶ���r������ͬ�r�Y�ϽyӋģʽ�;䷨ģʽ�R�e����Q���w���}��
�����W�j��һ�Nģ�����W�j�M�зֲ�ʽ������Ϣ̎��C�������Wģ�ͣ���ͨ�^�{���Ȳ��������c֮�g��B���Pϵ�팍�F��Ϣ����̎����Ŀǰ�W�j�ֿ��Mһ���֞� BP �W�j�� Hopfield �W�j�c ART �W�j�ȡ��W�j���к��ķ��Ծ��ԔM�ϣ�ӛ���Լ��ԌW���������W��Ҏ�t���Σ�����Ӌ��C���F����˵õ��ˏV���đ���[102-104]�����W�j���ЌW���ٶ�������������ֲ��Oֵ�Լ����r�������ݶ���ʧ�����ݶȱ�ը��ȱ�c��
����2006 �꣬HINTON �� SALAKHUTDINOV[105] �����һ�N���ڟo�O����������žW�j����Q������W�jӖ�����y�}����������ȌW�����˳����Ⱥ�ӿ�F�˰���ϡ���Ծ��a��[106]��������Ɲ���C�����e�W�j[107]��ѭ�h�W�j���������ʽ�����W�j[108]��ģ�͡��c���y�ęC���W����ȣ���ȌW���ᳫ���ö˵��˵ķ�ʽ����Q���}����ֱ�ӌ��D��������ȡ�cģʽ�������һ��Ȼ��������w��ģʽ���Ŀ�˓pʧ����(�罻���ؓpʧ��Hinge �pʧ������)�Ĕ������Ԅӵ،W������Ч������[109]�����Fģʽ����W���������������ȌW������Ӌ��Cҕ�X[110]���Z���R�e[111]���ַ��R�e[112]����ͨ[113]���r�I[6,114]������ȱ�ݙz�y[75,115] ���I��ȡ���˾�ɹ�����ȌW��Ҳ����ȱ�����Ƶ���Փ֧�֡�ģ�����_����C���s���韩����Ҫ����Ӗ���ӱ���Ӌ������Ȇ��}�������S����ȌW���о��IJ������룬����C��ҕ�X�������V韵İlչ���g��——Փ�����ߣ��� �ƣ� ��־���� ���ꏊ
SCISSCIAHCI