�l(f��)���r�g��2020-02-24���ٷ���Ƽ�Փ���g�[��1��
ժ Ҫ�� ժҪ:���M���r(n��ng)�C���h����ӱO(ji��n)�y�r�����ˌ��F(xi��n)�O(ji��n)�y�Č��r����Ҫ����r�gͬ�����g(sh��)����ˣ�ᘌ��o���������W(w��ng)�j(lu��)�Еr�gͬ�����g(sh��)��(y��ng)���и�Ч���ҹ�(ji��)ʡ�YԴ��Ҫ�o����һ�N���ڷִصĸ��M·���㷨��ʹ�Õr�gͬ����Ч�ԙz���A�εĕr�g������ֻ�l(f��)��һ��С��(sh��)��(j��)���Ļ��A(ch��)
����ժҪ:���M���r(n��ng)�C���h����ӱO(ji��n)�y�r�����ˌ��F(xi��n)�O(ji��n)�y�Č��r����Ҫ����r�gͬ�����g(sh��)����ˣ�ᘌ��o���������W(w��ng)�j(lu��)�Еr�gͬ�����g(sh��)��(y��ng)���и�Ч���ҹ�(ji��)ʡ�YԴ��Ҫ�o����һ�N���ڷִصĸ��M·���㷨��ʹ�Õr�gͬ����Ч�ԙz���A�εĕr�g������ֻ�l(f��)��һ��С��(sh��)��(j��)���Ļ��A(ch��)�ό��F(xi��n)ͬ�����ܣ��Ķ���Ч��������Դ���ģ������ͬ��ͨ�ŵ�Ч�ʡ�������C�����Ŀ����ԣ�����NS2����ܛ���͌��ķ�ʽ��ͬ��ͨ�������M������C���Y(ji��)������:���ø��M���·���㷨������Ч���ͬ��ͨ�ŵ�Ч�ʣ��Ҍ��Y(ji��)���ͷ���Y(ji��)�������Ǻϣ��Ķ���C�˷����Ŀ����ԺͿɿ��ԡ�
�����P(gu��n)�I�~:�o�����оW(w��ng)�j(lu��);�ִ��㷨;�r(n��ng)�C�O(ji��n)��;ͬ��ͨ��;NS2����
����0����
�����r�gͬ������Ҫ�f(xi��)ͬ�����Ă������W(w��ng)�j(lu��)ϵ�y(t��ng)�е�һ���P(gu��n)�I�C�ƣ�������(sh��)�o���������W(w��ng)�j(lu��)�đ�(y��ng)�������衣���ڟo���������W(w��ng)�j(lu��)�����ԽM���ԡ������ԡ��ӑB(t��i)�ؓ��Ժ��YԴ�����Ե����c�������ܹ�(ji��)�c������Ӌ��������ͨ�Ŏ������惦���������ƣ�ʹ���O(sh��)Ӌ�ܝM�㲻ͬ�o���������W(w��ng)�j(lu��)��(y��ng)�õĕr�gͬ�����g(sh��)ʮ����Ҫ�����о��M���ִ�?z��)o�����оW(w��ng)�j(lu��)���뵽�r(n��ng)�C�h����ӱO(ji��n)�yϵ�y(t��ng)�ϣ�ͨ�^·���㷨�ă�(y��u)������߱O(ji��n)�yϵ�y(t��ng)��ͬ��ͨ���������Ķ����r�،��r(n��ng)�C���I(y��)��r�ͭh(hu��n)������(sh��)�M�бO(ji��n)�y��������r(n��ng)�C�����ܻ����Ԅӻ�ˮƽ��
����1���ڟo�����оW(w��ng)�j(lu��)���r(n��ng)�C�h����ӱO(ji��n)�yϵ�y(t��ng)
�������ˌ��F(xi��n)�r(n��ng)�C���h�̱O(ji��n)�أ���Ҫ���r(n��ng)�C�ϰ��b�^����O(sh��)�䣬�@Щ�O(sh��)�����ͨ�^�F(xi��n)�������M���B�ӡ��F(xi��n)������CANͨ��Ч�ʸߣ��ٶȿ죬�������Σ���һ�N���Ї��H�˜ʵĬF(xi��n)�����������h����ӱO(ji��n)�y�r�����Ԍ��O(ji��n)�y��(sh��)��(j��)��CAN��������ʽ�M�Ђ�ݔ��Ȼ����ͨ�^�o�������O(sh��)����͵��h�̿͑��ˣ���λ�C���Ԍ��r���C܇�\����Ϣ�M�бO(ji��n)�y�ʹ惦���錍�F(xi��n)���g���I(y��)�C܇�������I(y��)�ṩ������(j��)��
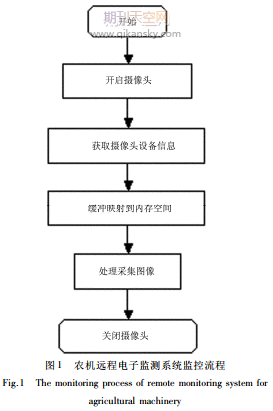
�����������g�C܇���O(sh��)���������f���^��(f��)�s��߀Ҫ���]�����r�ԡ��������y�׳̶ȣ�������r(n��ng)�C�����I(y��)Ч�ʣ������h�̱O(ji��n)�y�Ϳ��Ƶķ�ʽ�����M���h����ӱO(ji��n)�y�r������GPRS�l(f��)�����_�z���^������O(sh��)���_ʼ���_�z���^���ҫ@ȡ�z���^�O(sh��)����Ϣ�;��_�^(q��)��ͨ�^��(sh��)��(j��)̎�팦�ɼ����ĈD���M��̎�����P(gu��n)�]�z���^�O(sh��)�䣬��D1��ʾ��
�����r(n��ng)�C���I(y��)�r���������ø��N���������h(hu��n)���͜ضȵ���Ϣ�M�вɼ���Ҳ�Ɍ����r���I(y��)��r��Ϣ���͵�����Ļ�ϣ�ʹ�r(n��ng)�C�\����Ϣ���F(xi��n)���r�@ʾ���ԄӸ�ۙ����ݔ��(sh��)��(j��)�ȣ��_�����r(n��ng)�C�f(xi��)ͬһ�w��������Ŀ�ġ�
����2���ڷִؽY(ji��)��(g��u)�ğo���������W(w��ng)�j(lu��)����·���㷨
�����o�����оW(w��ng)�j(lu��)��һ�N�m��(y��ng)�Ա��^����ͨ�žW(w��ng)�j(lu��)��ͨ�^��������(ji��)�c�_���ԽM������ʽ�W(w��ng)�j(lu��)�����Բɼ���̎���͂��_�W(w��ng)�j(lu��)���w������(n��i)�ĸ��N��(sh��)��(j��)��Ϣ��������õ��P(gu��n)�I��Ϣ�l(f��)�ͽo�^���ߣ������D2��ʾ���o�����оW(w��ng)�j(lu��)�ں��ˮ�ǰ���N���M�ļ��g(sh��)�������F(xi��n)��ͨ�ż��g(sh��)����Ӽ��g(sh��)���Ԅӻ�ϵ�y(t��ng)�ȣ���߉��Ϣ�Ϳ��^���w�ں���һ�𣬱��V���ؑ�(y��ng)���ڭh(hu��n)���ıO(ji��n)�y���A(y��)���r(n��ng)�I(y��)����ͨ���I(l��ng)��
�����@�N�o�����оW(w��ng)�j(lu��)�dz��õ�һ�N��ͣ��W(w��ng)�j(lu��)�Ђ�������(ji��)�c�֞���ͨ��(ji��)�c�ͅ�����(ji��)�c�����У���ͨ��(ji��)�c��ͨ�Ŷ����ԅ�����(ji��)�c�_ʼ�ģ�ͨ�^�ͅ�����(ji��)�c�ľ��x���_��ͨ�ŵČӴΣ�����ͬ�����^���������Ϣ�Č��r���f��
�������ڷִ��㷨�Ĺ�(ji��)�c�ֲ�ʾ��D��D4��ʾ����ԓ�W(w��ng)�j(lu��)�Y(ji��)��(g��u)�Пo����������(ji��)�c���֞�ܶ�أ��������˴��ʹع�(ji��)�c�����ͅ�����(ji��)�c��������W(w��ng)�j(lu��)�İl(f��)���ʣ�ʹ��ͨ�ŷ������W(w��ng)�j(lu��)��������(sh��)�p�١�ͬ���y(t��ng)�ğo�����оW(w��ng)�j(lu��)����^����������(ji��)�c���^�h�Ĺ�(ji��)�c��������(sh��)Ҳ�������ͣ��Ķ�������ͨ���^�̵�ͬ���`�����˾W(w��ng)�j(lu��)ͨ�ŵČ��r�ԡ�
�������O(sh��)�Ѓɂ���(ji��)�c�քe��x��y�����r�r�g��t����������(ji��)�cx��(n��i)����ʎ���Č��r�r�g��Cx(t)������ͨ�^��(ji��)�cx�����㹝(ji��)�cy�ĕr�g���Ķ��_��ͬ��ͨ�ŵ�Ŀ��
�������F(xi��n)ͬ��ͨ�ź���ͬ�r�����_���I(y��)���r(n��ng)�C�M�Ќ��r�O(ji��n)�أ��������I(y��)��r���r�����o�r(n��ng)�C�����ˆT���Ա�����ߌ��F(xi��n)���_�ąf(xi��)ͬ�������Ķ���Ч������r(n��ng)�C�����I(y��)Ч�ʡ�
�������]��x���r(n��ng)�I(y��)�Cе�Tʿ�����I(y��)Ͷ�Ŀ��ﶼ����Щ
�����r(n��ng)�I(y��)�Cе����ĴTʿ�����I(y��)��Ҫ���ں��Ŀ���l(f��)��Փ�ģ���ô�@һ���I(y��)�ĴTʿ������Ͷ�嵽��Щ���Ŀ�����?�Tʿ�����ڿ�����x���˽⣬���С�����@�����]�ˎױ��r(n��ng)�I(y��)ĺ��Ŀ��������u�r�������酢����
����3���ڷִ�?z��)o�����оW(w��ng)�j(lu��)���r(n��ng)�C�h�̱O(ji��n)�yϵ�y(t��ng)�yԇ
������ǰ�S���r(n��ng)�I(y��)�Ԅӻ����g(sh��)�IJ����M������N�C�͵ğo���{��O(sh��)�䱻Ͷ�ŵ��r(n��ng)�I(y��)���I(y��)��ʹ�á��ڟo���{����I(y��)�l���£��h�̱O(ji��n)�yϵ�y(t��ng)�Ƿdz���Ҫ�ģ����O(ji��n)�yϵ�y(t��ng)����Ч�ʺ����|(zh��)���ĺÉ���Ҫȡ�Q�ڱO(ji��n)�yϵ�y(t��ng)ͨ�����������ڷִ�?z��)o�����оW(w��ng)�j(lu��)�����^�ߵğo��ͨ����������ͨ�ŵ�ͬ���Ժÿ��ԝM�㌍�rͨ�ŵ����o���{����I(y��)�Cе���I(y��)��r��D5��ʾ��
�����o���{����I(y��)һ�㑪(y��ng)���ڵ�ƽ̹�����I(y��)��e�^��ą^(q��)����ԓ�N���I(y��)��ʽ������Ч������r(n��ng)�C���I(y��)�����ܻ����Ԅӻ�ˮƽ�����������ɱ�Ͷ�룬������I(y��)Ч�ʡ����������I(y��)�^����̎�ڟo���{��B(t��i)�����Բ����h�̱O(ji��n)�y�ķ�ʽ���r(n��ng)�C�M���h�̿��ƣ�����������I(y��)�|(zh��)����������Ҫ����O(ji��n)�yϵ�y(t��ng)�M���O(sh��)Ӌ�����Ȳ���NS2����ķ��������оW(w��ng)�j(lu��)�Ĺ�(ji��)�cͨ���M����C���Եõ����rͨ�������^���ğo�����оW(w��ng)�j(lu��)��
��������NS2���o�����оW(w��ng)�j(lu��)�M�з���������Ŀ��Ҫ�����W(w��ng)�j(lu��)ͨ�ŷ�������(ji��)�c��(sh��)��ͨ�Ű돽��ͬ����ݔ��Ϣ����С����̖�l(f��)�书�ʺ�Datarate�ȣ����Å���(sh��)���1��ʾ���䲼�úõĹ�(ji��)�cʾ��D��D6��ʾ��
�������Ό��o�����оW(w��ng)�j(lu��)����Ҫ�yԇ�Ŀ��ͬ��ͨ����������Ҫͨ�^��ͬ��(ji��)�c��(sh��)��Ҫ��ͬ���r�g��y�㣬�y��Y(ji��)����D7��ʾ��
�����D7�У�1��ʾδ���÷ִ�?z��)o���W(w��ng)�j(lu��)�r��ͬ���r�g��2��ʾ�����˷ִ�?z��)o���W(w��ng)�j(lu��)�r��ͬ���r�g��Ӌ��Y(ji��)������:���÷ִ�?z��)o���W(w��ng)�j(lu��)������ͬ���r�g���@�ț]�в��õĶ̣��Ķ�����˟o��ͨ�ŵ�Ч�ʡ�
����������C����Ĝʴ_�ԣ����r(n��ng)���ﲼ���˂������W(w��ng)�j(lu��)��������ͨ���M���˳����Ĝyԇ�����2��ʾ���yԇ�Y(ji��)������:����͌��Y(ji��)�����Ǻϳ̶��^�ߣ��Ķ���C�˷����Ŀ����ԡ�
����4�Y(ji��)Փ
������������r(n��ng)�C�h����ӱO(ji��n)�yϵ�y(t��ng)��ͬ��ͨ�����������F(xi��n)���r(n��ng)�C�f(xi��)ͬ�O(ji��n)�y�����r(n��ng)�C�O(ji��n)�y�o�����оW(w��ng)�j(lu��)·���㷨�������˷ִ��㷨�������ͬ��ͨ��Ч�ʣ����F(xi��n)�˶��r(n��ng)�C�O(ji��n)�y�Č��r�ԡ�������C�����Ŀ����ԣ����ȴ��100m×100m���w�����ğo�����оW(w��ng)�j(lu��)��������NS2����ܛ���͌�����·���㷨����Ч���M������C����C�Y(ji��)������:���÷ִ��㷨�o�����оW(w��ng)�j(lu��)��ͬ��ͨ�������������@����ߣ����r(n��ng)�C�o�˻����I(y��)���g(sh��)�İl(f��)չ�ṩ��һ�N�µļ��g(sh��)���ϡ�