�l(f��)���r(sh��)�g��2018-07-26���ٷ���Ƽ�Փ���g�[��1��
ժ Ҫ�� ժҪ��ᘌ�(du��)ij���d����ͨ���й�늸���ϵ�y(t��ng)�ķ����R�M���M(j��n)���о�����(du��)�������N����֧�η������Y(ji��)�Ͽ��g�d�Ɍ�(sh��)�H��(y��ng)���龰�C���u(p��ng)���Y(ji��)��(g��u)�Ą��ȃ�(y��u)��(sh��)�����ξ��ȡ������Y(ji��)���������i�ڂ�(c��)���_�۵�����֧�η����������͜ض�׃��Ӱ��µ����ξ���(RMS)���_(d��)2.05nm��8.88nm��
����ժҪ��ᘌ�(du��)ij���d����ͨ���й�늸���ϵ�y(t��ng)�ķ����R�M���M(j��n)���о�����(du��)�������N����֧�η������Y(ji��)�Ͽ��g�d�Ɍ�(sh��)�H��(y��ng)���龰�C���u(p��ng)���Y(ji��)��(g��u)�Ą��ȃ�(y��u)��(sh��)�����ξ��ȡ������Y(ji��)���������i�ڂ�(c��)���_�۵�����֧�η����������͜ض�׃��Ӱ��µ����ξ���(RMS)���_(d��)2.05nm��8.88nm�����lģ�B(t��i)��926.1Hz���ڱ��C���ξ��ȵ�����Ҫ���c�߄��ȵ������(d��ng)�p�ĵ�ƽ���У��@�N�����O(sh��)Ӌ(j��)�������������M(j��n)һ�����������֧�νY(ji��)��(g��u)�ą���(sh��)��(y��u)���O(sh��)Ӌ(j��)���M(j��n)���˄�(d��ng)���W(xu��)�������l��푑�(y��ng)��(y��ng)�����ֵ��96MPa��С�ڲ��ϵĿ�����(qi��ng)�ȘO��;�S�C(j��)���(d��ng)�����Y(ji��)�������������R���ٶ�푑�(y��ng)��������11.14gRMS�����M��3σ��(zh��n)�t���������ͨ�^0.2g���Ғ��lԇ�(y��n)���(y��n)�C������Ԫģ�B(t��i)��������(du��)�`���2.4%����(sh��)�(y��n)�Y(ji��)�������������Y(ji��)��������(zh��n)�_�ɿ������ԭh(hu��n)��(ji��)�O(sh��)Ӌ(j��)�ɿ����M��ʹ��Ҫ��
�����P(gu��n)�I�~���pС�ͷ����R;����֧��;����Ԫ����;��(d��ng)�B(t��i)����;���ξ��ȡ�
����1����
�������d����ͨ�Ź�늸���ϵ�y(t��ng)���õĴָ�ۙ�D(zhu��n)�_(t��i)�Y(ji��)��(g��u)��ʽ��Ҫ���f���ʽ�Y(ji��)��(g��u)���ܒ����h(yu��n)�Rʽ�Y(ji��)��(g��u)�͆η����Rʽ�Y(ji��)��(g��u)�������ܒ����h(yu��n)�Rʽ�Y(ji��)��(g��u)��һ�N��Ƕ��ŷ��ĸ�ۙ�D(zhu��n)�_(t��i)�Y(ji��)��(g��u)��ʽ��ϵ�y(t��ng)���ÃɉK�������ֱ�ķ����R�M��ͨ�^����ʽ�ܒ��D(zhu��n)�_(t��i)�ķ�λ�����Sϵ�Ķ��S�D(zhu��n)��(d��ng)������(d��ng)�����R�����D(zhu��n)��(sh��)�F(xi��n)�ˌ�(du��)���S�Ķ��S�{(di��o)�����ܒ����h(yu��n)�Rʽ�����D(zhu��n)�_(t��i)��·��(j��ng)�^�ɴη��䣬����h(hu��n)��(ji��)�࣬���Ԍ�(du��)�ڷ����R�M���ڵ��������͜ض�׃���r(sh��)���ξ���Ҫ��ߣ����������l(w��i)���d���ڻ���w���^���еĿ������w�С���(j��)�g�η��x��(hu��)�a(ch��n)�����l���(d��ng)���Լ����(d��ng)���͇������ȵĄ�(d��ng)���W(xu��)�h(hu��n)������(du��)�ڷ����R�M���Ą�(d��ng)�B(t��i)����Ҳ���^��Ҫ����(n��i)��W(xu��)�߽�(j��ng)�^�о��l(f��)�F(xi��n)����֧�νY(ji��)��(g��u)���O(sh��)��һ���̶ȵ����ԭh(hu��n)��(ji��)����Ч���Ʒ����R�M�����������r�µ����ξ��ȣ�ͬ�r(sh��)�����R�ĽY(ji��)��(g��u)������Ȼ������һ���̶��ϵ��Ա��C[1-4]����ˣ�����֧�νY(ji��)��(g��u)�ڿ��g�d�ɵ��O(sh��)Ӌ(j��)�еõ��˴����đ�(y��ng)�á�
����Paros��Weisbord����1965��������ˈA���������q�֧�΄��ȵ�Ӌ(j��)�㹫ʽ[5]��Smith����1997��ᘌ�(du��)�E�A�������q�֧�΄����M(j��n)����Ԕ��(x��)���о�[6]������(n��i)��F����Smith�о����A(ch��)�ϣ���������пڙE�A�����q�֧�Σ���������@������q朵��D(zhu��n)��(d��ng)���ȵ�Ӌ(j��)�㹫ʽ���M(j��n)���˷����͌�(sh��)�(y��n)�(y��n)�C[7];��ӿƴ�������µ�������˹��������q朡����A��ֱ���������q机͙E�A�������q��@���N�����q朵Ą����c�O(sh��)Ӌ(j��)����(sh��)֮�g���P(gu��n)ϵ[8]���Ї��ƌW(xu��)Ժ�L(zh��ng)����C(j��)��������ᘌ�(du��)��ڏ����g�����R�����һ�NCartwheel������֧���O(sh��)Ӌ(j��)����[9];�L(zh��ng)����C(j��)�����е�ᘌ�(du��)���g�����R�����һ�N������֧�εײ����b���_�A����֧�νY(ji��)��(g��u)�����Ҍ�(du��)�@�N����֧�νY(ji��)��(g��u)���P(gu��n)�I�ߴ煢��(sh��)�M(j��n)���˃�(y��u)�����@�N�Y(ji��)��(g��u)��ԭ����ʮ�ֽӽ��������q��
����ͨ�^��������(n��i)���о��ĬF(xi��n)���Ҋ������֧����һ�N��������Ч�ı��C�����R�����ξ��ȵ��O(sh��)Ӌ(j��)��ʽ����������������(n��i)���о��ɹ��Ļ��A(ch��)�ϣ���(du��)�����i�ڂ�(c��)���_������֧�νY(ji��)��(g��u)���i�ڭh(hu��n)���в�����֧����ʽ�Լ�����ֱ���в�����֧����ʽ�ڵֿ�����ጷ��µ����ξ��ȣ��Լ����Ԅ�(d��ng)�B(t��i)�������ԣ��C�ό�(sh��)�H�b����r�O(sh��)Ӌ(j��)���������ķ����R�M������Kͨ�^���Ғ������(d��ng)��(sh��)�(y��n)�(y��n)�C�����Ĝ�(zh��n)�_�ԡ�
����2�����R�M����֧�νY(ji��)��(g��u)�O(sh��)Ӌ(j��)�c����
����2.1�����R�M���Y(ji��)��(g��u)�O(sh��)Ӌ(j��)
���������O(sh��)Ӌ(j��)�ķ����R�M���ɷ����R������֧���r���Լ��E�A�������b��M�ɣ���D1��ʾ��
����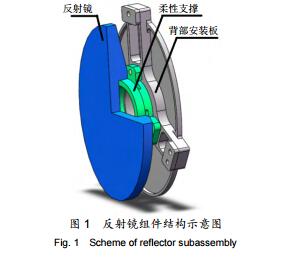
�������з����R�ʙE�A�ͣ������L(zh��ng)߅ֱ����104mm����߅ֱ����74mm�������R��������֧�η�ʽ��ͨ�^ճ�ӷ�ʽ�c����֧���r�����B�ӡ�����֧���r���i�ڂ�(c��)���_���Բۣ�����֧���r���c�E�A�������b��ͨ�^����B�ӡ�
���������R�����x�������Ûϵ��(sh��)�OС��������(Zerodure)�Ƴ�;����֧���x����(4J32)���ϣ������Ûϵ��(sh��)�c�����R����������Ûϵ��(sh��)������ͬ��ʹ�÷����R�ğ᷀(w��n)����������;�E�A�������b���x��⁺Ͻ���ϣ���������˷����R���ж�λ֧�νY(ji��)��(g��u)�O(sh��)Ӌ(j��)��
����2.2�����R����֧�η���
�������g�����R��(du��)�ڵ��l���(d��ng)�h(hu��n)���µĄ�(d��ng)�d�ɷ�(w��n)����Ҫ���^�ߣ����˱��C�����R�M����(d��ng)�d���^�ߵķ�(w��n)���ԣ������R�Ĺ̽Y(ji��)����Ҫ�����A(y��)�o�����������ڿ��g�h(hu��n)��������ጷţ��A(y��)�o���Ĵ����ִ�ʹ�Y(ji��)��(g��u)��(y��ng)����ጷ��y�Կ��ƣ��R�����������ܵ��^��Ӱ�[10]��ԇ�D�O(sh��)Ӌ(j��)һ�N����֧���r�ף����ܱ��C��(d��ng)�d���µĽY(ji��)��(g��u)���ȣ����ܱ��C�^�õ����ξ��ȡ�
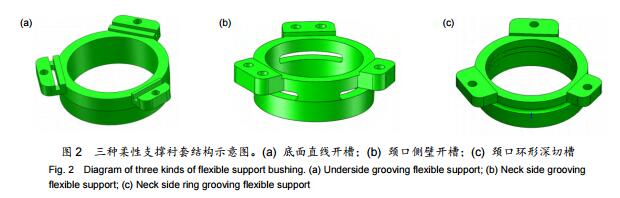
�������ćLԇ���N����֧���r���������������r�ľֲ��^(q��)���_�ۿڣ������C���N����������֧�ۿڵČ�����ͬ���Ա㔵(sh��)��(j��)��(du��)�ȡ���һ�N��������֧���r������(g��)���b�����_ֱ���ۿڣ����ӽY(ji��)��(g��u)�����ԣ��@�N�Y(ji��)��(g��u)������Ч���͜ض�׃��������ጷ�Ӱ��±�������(d��ng)�r�װl(f��)���Ļ��đ�(y��ng)׃�����ķ����R�����`�ԓ����������֧�βۿڌ��Ȟ�2mm���в���Ȟ�2.5mm���|(zh��)����0.039kg����D2(a)��ʾ;�ڶ��N��������֧���r���i�ڂ�(c��)��̎�_�ۣ��@�N�Y(ji��)��(g��u)��Ҫ���˜pС�ض�׃��������ጷ�Ӱ��®a(ch��n)����Ť�D(zhu��n)�c���Б�(y��ng)׃�����ķ����R�����`�ԓ�����IJۿڌ��Ȟ�2mm���вۈA�Ľ�b=0.87rad���|(zh��)����0.039kg����D2(b)��ʾ;�����N������֧���r�Ă�(c��)��̎�_�h(hu��n)�����вۣ��@�N�Y(ji��)��(g��u)��ԭ���Ͻӽ����q֧�νY(ji��)��(g��u)����(sh��)�F(xi��n)�S���D(zhu��n)��(d��ng)��ʹ���ṝ(ji��)�������S�D(zhu��n)��(d��ng)���ԡ�ԓ�����IJۿڌ��Ȟ�2mm�����ܭh(hu��n)���вۣ��|(zh��)����0.04kg����D2(c)��ʾ��
����
�������˱��C��늸���ϵ�y(t��ng)���@��ۙ���ȣ������R�M��횱��C���õĄ�(d��ng)�B(t��i)�����Դ_����늸���ϵ�y(t��ng)����(hu��)��?y��n)����_��(d��ng)���a(ch��n)������(d��ng)����?y��n)��늸���ϵ�y(t��ng)��܉�����r(sh��)��(hu��)�ܵ��ض�׃���Լ�����������Ӱ푣������茦(du��)�����R�M�M(j��n)��ģ�B(t��i)�Լ������R���ξ����M(j��n)�з�����
����2.3���N����֧�η��������`���cģ�B(t��i)������(du��)�Ȟ��˷��������R�M�������ξ����c��(d��ng)�B(t��i)���ԣ���MSCPatran�Ќ�(du��)�����R�M��������Ԫģ����D3��ʾ��
����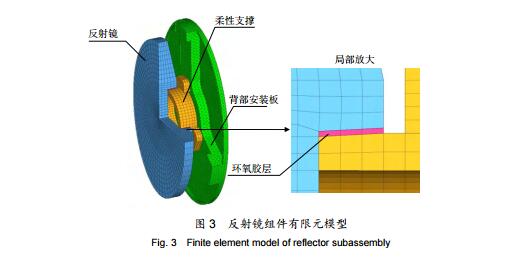
���������R�M����������6707��(g��)�����w��Ԫ�������R�湲858��(g��)��(ji��)�c(di��n)���ڷ������ξ��ȡ�ԓ���d��˙C(j��)�����R����������(Zerodur)������֧���r���x����(4J32)���ϣ��E�A�������b���x��⁺Ͻ�(TC4)�������ϵIJ��ό������1��ʾ��
����
���������R��܉�������g���ܵ������Լ��ض�׃���h(hu��n)����Ӱ푣���Ҫ���췴���R�M���ڷ����淨���cˮƽ��45°�A�ǰ��b��B(t��i)������ጷţ��Լ�5��ض�׃��Ӱ��µĄ��wλ�ƣ�ͨ�^��׃������Ԫ���������õ������R�M���������͜ض�׃��Ӱ��µĄ��wλ���ƈD��D4���D5��ʾ
����tu4
������ȡ�����R�R�湝(ji��)�c(di��n)�ƵĄ��wλ�Ɣ�(sh��)��(j��)�M�����N֧�η����µķ�����������`������Y(ji��)�����2��ʾ��
����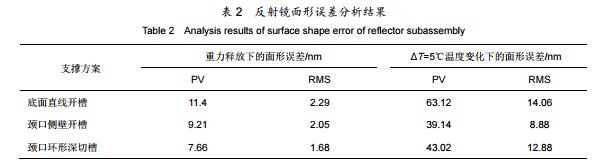
������(du��)�����N����֧�η����������`��Y(ji��)��������ڵ���ֱ���_�ۿ�����֧�νY(ji��)��(g��u)���i�ڂ�(c��)���_���c�i�ڭh(hu��n)���в�֧�νY(ji��)��(g��u)������Ӱ��µ����ξ���(RMS)�քe������10.5%��26.7%;�ض�׃��ΔT=5����������͜ض�׃��Ӱ��±�������(d��ng)�r��(d��o)�·����R�l(f��)��څ��“ǰ�A”����׃����D4���D5��ʾ��������ֱ���_�۽Y(ji��)��(g��u)ᘌ�(du��)����׃��څ��(sh��)�����@�ĸ���Ч�������nj�(du��)��“ǰ�A”څ��(sh��)����׃��������Ч���������@;���i�ڂ�(c��)���_�ۿ�����Ч��ጷŷ����R45°���b�������Լ��ض�׃�������“ǰ�A”���Б�(y��ng)�������������ξ��ȡ�
����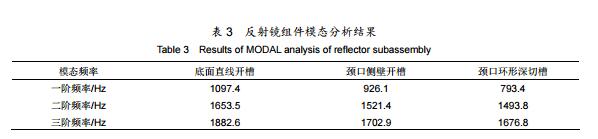
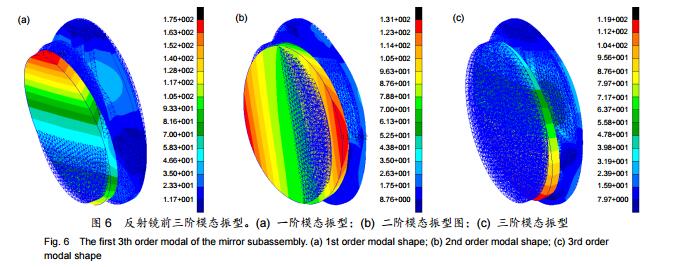
������3�����ֱ���_�ۡ��i�ڂ�(c��)���_���Լ��i�ڭh(hu��n)�����в�����֧���r�Y(ji��)��(g��u)�ķ����R�M��ģ�B(t��i)�����Y(ji��)�ξ���(RMS)�քe������36.8%��8.5%����Ҋ�ڂ�(c��)���_�۷�ʽ�܉����@���Ʒ����R�������͜ض�׃��Ӱ��µ����ξ��ȡ��@�N�Y(ji��)�����F(xi��n)��ԭ����������ጷŹ���ͨ�^��(du��)���Mģ�B(t��i)�l�ʵČ�(du��)�ȿ�֪������ֱ���_��֧�η����ķ����R�M�����l��ߣ�ֵ��1097.4Hz������(d��ng)�B(t��i)�������;�i�ڭh(hu��n)�����в�֧�η�����(d��ng)�B(t��i)�����½��^���@;�i�ڂ�(c��)���_��֧�η����ķ����R�M��һ�A�l�ʞ�926.1Hz�����^�ڵ���ֱ���_������֧�νY(ji��)��(g��u)����(d��ng)�B(t��i)�����½������½���ԭ��ĈD6��ǰ���A�l�����Ϳ�֪���@�N���ԽY(ji��)��(g��u)ጷ���“�A��”��“ƫ�[”��“�@��(d��ng)”�Ŀ��g���ɶȣ���Ҫʹ�����ξ����^�߾�ǡǡ��Ҫጷ��@����(g��)���g���ɶȣ���ô�@����һ��(g��)ì���c(di��n)��
����
�����C�����N�Y(ji��)��(g��u)��ƽ��Ч�����i�ڂ�(c��)���_��֧�η���Ч����ѣ��ȱ��C������ጷ�Ӱ������õ����ξ��ȣ���ʹ�÷����R�M�������^�ߵĄ�(d��ng)�d���ȣ���������Ҫᘌ�(du��)�i�ڂ�(c��)���_������֧�νY(ji��)��(g��u)�M(j��n)���M(j��n)һ�����о��ͷ�����2.4�i�ڂ�(c��)���_�����ԽY(ji��)��(g��u)����(sh��)�O(sh��)Ӌ(j��)����֧�νY(ji��)��(g��u)ж�d�����Ļ���ԭ�������������q朣����ԭh(hu��n)��(ji��)λ��֧�νY(ji��)��(g��u)�IJ�ͬλ�Ì�(du��)��֧�νY(ji��)��(g��u)�Ą���Ҳ��(hu��)�a(ch��n)����ͬ��Ч����������Ҫ��������֧�ε��P(gu��n)�سߴ煢��(sh��)�����������µĄ��ȡ��i�ڂ�(c��)���_������֧�νY(ji��)��(g��u)�Ďγߴ�����в۲ی�2R���вۈA�Ľ�b�������q��̎t��������(sh��)��D7��ʾ��
����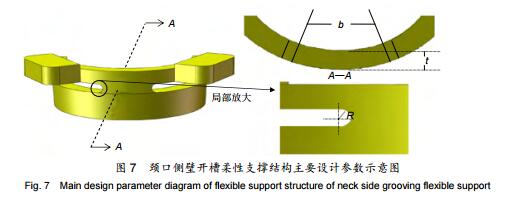
��������(j��)�īI(xi��n)[11]��֪������֧�νY(ji��)��(g��u)�Ą����S�����t��׃���ʬF(xi��n)ƽ��Ҏ(gu��)��׃��;�в۲ی�2R≤2mm�r(sh��)��֧�νY(ji��)��(g��u)�Ą��Ȍ�(du��)�в۲ی�2R׃�����У�RֵԽ������Ч��Խ���@�����nj�(du��)������ӑՓ������֧�εijߴ��������_�ی������2mm������(j��)����Ҏ(gu��)�����O(sh��)Ӌ(j��)����֧�νY(ji��)��(g��u)����(sh��)�r(sh��)����������(j��)�ӹ���ˇ�_��R�ijߴ煢��(sh��)��Ȼ��ͨ�^����Ԫ��������ͬbֵ�ķ����R�M���Ą��ȣ���(j��ng)�^����(f��)������Kʹ�ýY(ji��)��(g��u)�M�������ķ�(w��n)����Ҫ����(j��)�īI(xi��n)[8]Ӌ(j��)������D(zhu��n)��(d��ng)�����c������(sh��)֮�g���P(gu��n)ϵ����K�_�������q朵ĸ�����(sh��)��ֵ��R=1mm��b=0.94rad��t=3.5mm��
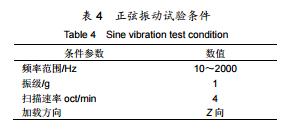
����3�i�ڂ�(c��)���_��֧�η�����(d��ng)���W(xu��)����3.1���Ҽ���(l��)�µ��l��푑�(y��ng)�����l��푑�(y��ng)����Ŀ�������(y��n)�C�i�ڂ�(c��)���_������֧�η����µķ����R�M���Ą�(d��ng)�d�Ʉ��ȿɿ��ԣ��A(y��)���ں�(ji��n)�C���(d��ng)�d���µĽY(ji��)��(g��u)��(qi��ng)���Ƿ����ͨ�^�l��푑�(y��ng)�����܉��A(y��)֪�Y(ji��)��(g��u)�ij��m(x��)��(d��ng)�����ԣ��(y��n)�C�Y(ji��)��(g��u)���O(sh��)Ӌ(j��)�Ƿ�������Ա���Y(ji��)��(g��u)�ڳ��������d�ɕr(sh��)ʧЧ[12-13]���������(d��ng)�����l�����4��ʾ��Ӌ(j��)��������ϵ��(sh��)ȡ0.05��
����
����푑�(y��ng)ݔ���c(di��n)�քeȡ����֧���r���i�ڂ�(c��)���_�۵IJۿ�̎��(ji��)�c(di��n)(Node8644)���R��߅����(ji��)�c(di��n)(Node9108)���R�����Ĺ�(ji��)�c(di��n)(Node8968)������ٶ�푑�(y��ng)�����͑�(y��ng)��푑�(y��ng)������D8�͈D9��ʾ��
����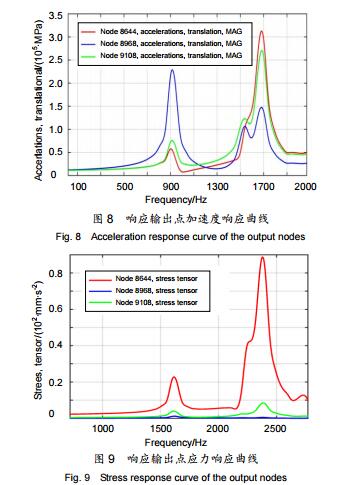
�����ɈD8��֪�������Ҽ���(l��)�£������R�M�����l�ʞ�913Hz�r(sh��)�ڮa(ch��n)������������;�o�B(t��i)�µ�ģ�B(t��i)���������l�ʞ�926.1Hz�����������(d��ng)�ĽY(ji��)���քe���3.5%���������(d��ng)�ĽY(ji��)��Ҳ�M(j��n)һ���(y��n)�C��ģ�B(t��i)���������_�ԡ����l��푑�(y��ng)�µ�����֧�ε�Ч��(y��ng)���ƈD10���Կ�������(y��ng)�����ֵ��96MPa���䓵Ŀ�����(qi��ng)�ȘO�ޞ�σb=514MPa���܉�M��Ⱥ͏�(qi��ng)��Ҫ������ԓ�Y(ji��)��(g��u)�ܳ��ܷ����R�ڰl(f��)���е����ҭh(hu��n)����������(d��ng)�p����3.2���Ҽ���(l��)�µ��l��푑�(y��ng)�������S�C(j��)�d�ɵĹ����V�ܶ�(powerspectraldensit��PSD)�����S�C(j��)���(d��ng)������ݔ��l�����5��ʾ��
����
�����u(p��ng)�������R�M�����S�C(j��)���(d��ng)�d�����Ƿ�a(ch��n)������׃�λ�p�ģ�������(j��)3σ��(zh��n)�t�����u(p��ng)����(bi��o)��(zh��n)[14]��������(j��)ݔ��Ĺ����V�ܶ�����Ӌ(j��)��ݔ����Ӌ(j��)������GRMSin��ͨ�^����Ԫ�l��푑�(y��ng)����Ӌ(j��)�㱻���˽Y(ji��)��(g��u)��푑�(y��ng)ݔ���^���c(di��n)��푑�(y��ng)������ֵGRMSout����GRMSout/GRMSin<3�J(r��n)��Y(ji��)��(g��u)�ǿɿ���ȫ��[14]�������u(p��ng)������֧�εĄ�(d��ng)�B(t��i)�Y(ji��)��(g��u)���ȣ�ȡ����֧���r���i�ڂ�(c��)���_�۵IJۿ�̎��(ji��)�c(di��n)(Node8644)���R��߅����(ji��)�c(di��n)(Node9108)���R�����Ĺ�(ji��)�c(di��n)(Node8968)����(g��)�����Թ�(ji��)�c(di��n)����푑�(y��ng)ݔ���^���c(di��n)��ͨ�^�l��푑�(y��ng)����Ӌ(j��)������^���c(di��n)�ļ��ٶ�푑�(y��ng)������������(j��)3σ��(zh��n)�t�Д�����֧�νY(ji��)��(g��u)�O(sh��)Ӌ(j��)�Ą�(d��ng)�B(t��i)�����Ƿ�ɿ����D11���D12���ȡ���c(di��n)�ļ��ٶ�푑�(y��ng)PSD�����c�۷e������ֵ(cumulativeRMS��CRMS)��
����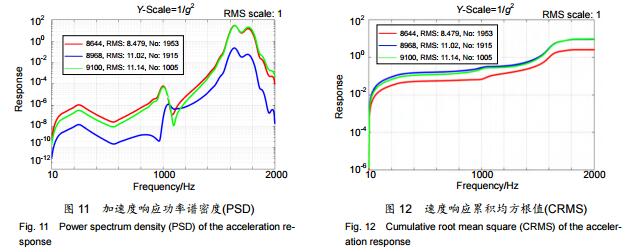
�����ķ����Y(ji��)�����Կ��������ٶ�푑�(y��ng)��������11.14gRMS���Ŵ�(sh��)��2.86���������ٶ�푑�(y��ng)������ֵС��3��ݔ�������ֵ���M��3σ��(zh��n)�t��
����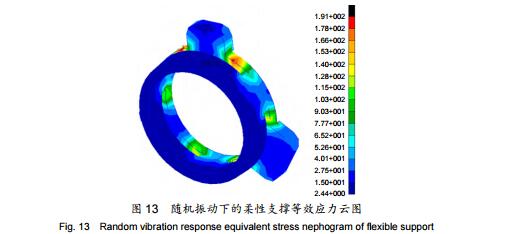
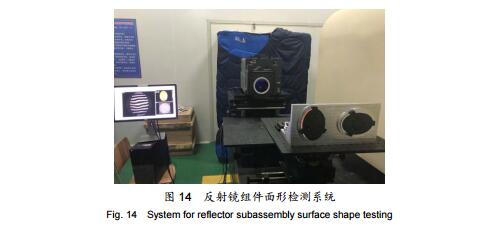
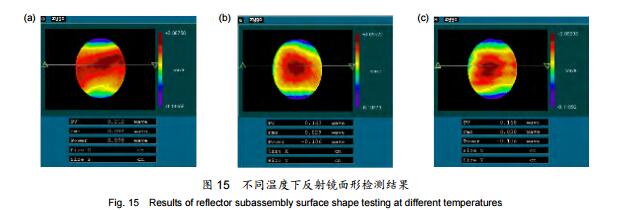
�����D13���S�C(j��)���(d��ng)�d��������֧�εĵ�Ч��(y��ng)���ƈD���ķ����Y(ji��)����֪���(y��ng)��ֵ��191MPa�����䓺Ͻ�Ŀ�����(qi��ng)�ȘO��σb��541.0MPa��������֧�νY(ji��)��(g��u)�O(sh��)Ӌ(j��)�ɿ����M�㏊(qi��ng)���c���Ȱ�ȫҪ��4��(sh��)�(y��n)�(y��n)�Cʹ��ZYGO�������x�քe��(20±5)��h(hu��n)���ض���(du��)�����R�M�������M(j��n)�Йz�y(c��)���z�y(c��)ϵ�y(t��ng)��D14��ʾ���D15(a)~15(c)�鲻ͬ�ض��[�R���εęz�y(c��)�Y(ji��)������(d��ng)�h(hu��n)���ضȞ�15�棬���ξ�����ֵ(RMS)��0.034λ����D15(a)��ʾ����(d��ng)�h(hu��n)���ضȞ�20�棬���ξ�����ֵ(RMS)��0.029λ����D15(b)��ʾ����(d��ng)�h(hu��n)���ضȞ�25�棬���ξ�����ֵ(RMS)��0.03λ����D15(c)��ʾ�����ԝM�㼤��ͨ����W(xu��)�쾀��(du��)�ڷ����R����ָ��(bi��o)��Ҫ��
����
����
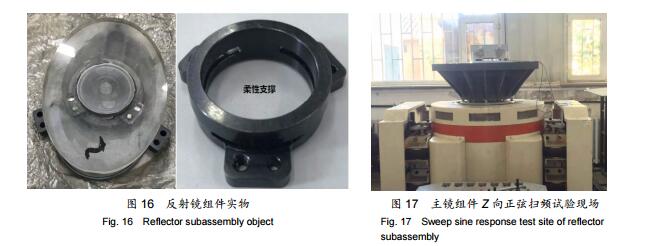
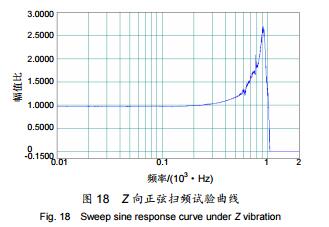
����ͨ�^0.2g���Ғ��lԇ�(y��n)���(y��n)�C�����R����֧�νY(ji��)��(g��u)���ȵĿɿ��ԣ������R�M����(sh��)����D16��ʾ���D17��Z�����Ғ������(d��ng)��(sh��)�(y��n)�b�ã�ԓ��(sh��)�(y��n)ͬ�r(sh��)�(y��n)�C������Ԫģ�ͺͷ����Ĝ�(zh��n)�_���ڷ����R�M�����尲�b��������ԓ�y(c��)�c(di��n)��푑�(y��ng)������D18��ʾ���ɈD18푑�(y��ng)������֪�����R�M��Z��һ�A��Ȼ�l�ʞ�904.3Hz���cģ�B(t��i)�����Y(ji��)��������(du��)�`���2.4%��
����
����
��������(j��)���Ғ��lԇ�(y��n)���Եó�������������Ԫģ�ͱ��^�ӽ���(sh��)�H��r�������Y(ji��)������(du��)��(zh��n)�_��
����5�Y(ji��)Փ
��������ᘌ�(du��)ij���d�ķ����R�M���M(j��n)���о����O(sh��)Ӌ(j��)��һ�N�i�ڂ�(c��)���_������֧�νY(ji��)��(g��u)��ʹ֮��ԭ���Ͻӽ����q֧�Σ������^�ڵ���ֱ���_�ۿ��c�i�ڭh(hu��n)���в�����֧�νY(ji��)��(g��u)���i�ڂ�(c��)���_��֧�νY(ji��)��(g��u)�������Լ�ΔT=5�������£������R���ξ���RMSֵ�քe��2.05nm��8.88nm�������R�M��һ�A�l�ʞ�926.1Hz����ԓ�Y(ji��)��(g��u)�܉�@���^�������֧�΄����Լ����ξ��ȡ�
�����ڴ˻��A(ch��)�ϣ�����˷����R����֧�νY(ji��)��(g��u)�ą���(sh��)���O(sh��)Ӌ(j��)���S��(du��)����(sh��)��(y��u)���O(sh��)Ӌ(j��)��ķ����R�M���M(j��n)����ԇ�(y��n)ǰ�Ą�(d��ng)�B(t��i)�����A(y��)�з��������c(di��n)�����˰l(f��)���R�M��������(du��)���^����������֧���ϵđ�(y��ng)��푑�(y��ng)��r����(du��)���Ƿ��(hu��)���������(d��ng)�c�S�C(j��)���(d��ng)�аl(f��)���ƉĻ�����׃�νo���˵ĽY(ji��)Փ����Kͨ�^ԇ�(y��n)�Y(ji��)�������A(y��)ʾ�����Y(ji��)���cԇ�(y��n)�Y(ji��)�����������
���������īI(xi��n)
����[1]LiX,XuZB,LiJQ.Designofnewflexurehingesupportofspacereflectorsubassembly[J].ElectronicMeasurementTechnology,2014,37(8):1–6.����,�����,���o��.���g�����R��������֧�νY(ji��)��(g��u)�O(sh��)Ӌ(j��)[J].��Ӝy(c��)�����g(sh��),2014,37(8):1‒6.
����[2]SchafferCB,JamisonAO,MazurE.Morphologyoffemtosecondlaser-inducedstructuralchangesinbulktransparentmaterials[J].AppliedPhysicsLetters,2004,84(9):1441–1443.
����[3]LiuM,ZhangXM,FatikowS.Designandanalysisofamulti-notchedflexurehingeforcompliantmechanisms[J].PrecisionEngineering,2017,48:292–304.
����[4]DuZJ,YangM,DongW,etal.Staticdeformationmodelingandanalysisofflexurehingesmadeofashapememoryalloy[J].SmartMaterialsandStructures,2016,25(11):158–163.
����[5]ParosJM,WeisborL.Howtodesignflexurehinges[J].MachineDesign,1965,37(27):151–157.
����[6]SmithST,BadamiVG,DaleJS,etal.Ellipticalflexurehinges[J].ReviewofScientificInstruments,1997,68(3):1474–1483.
����[7]ChenGM,LiuXY,JiaJY.Compliancecalculationofellipticalflexurehinge[J].ChineseJournalofMechanicalEngineering,2006,42(S1):111–115.��F��,��СԺ,�Z��Ԯ.�E�A�����q朵����Ӌ(j��)��[J].�C(j��)е���̌W(xu��)��(b��o),2006,42(S1):111–115.
����[8]ZuoXY,LiuXM.Calculationandanalysisofrotationalstiffnessforthreetypesofflexurehinges[J].ChineseJournalofScientificInstrument,2006,27(12):1725–1728.������,������.���N�Π������q��D(zhu��n)��(d��ng)���ȵ�Ӌ(j��)���c����[J].�x���x���W(xu��)��(b��o),2006,27(12):1725–1728.
����[9]LiZX,ChenX,ZhangL,etal.Designofcartwheelflexuralsupportforalargeaperturespacemirror[J].ActaOpticaSinica,2014,34(6):210–218.����,�ѩ,����,��.��ڏ����g�����RCartwheel������֧���O(sh��)Ӌ(j��)[J].��W(xu��)�W(xu��)��(b��o),2014,34(6):210–218.
����[10]LiXF,WangB,HuY.Influenceofmirrorthermaldistortioninthermospheretospace-to-groundlasercommunicationlinks[J].JournalofAstronautics,2005,26(5):581–585.��Է�,����,����.��܉�\(y��n)�П�h(hu��n)���µ��쾀�R���׃�Ό�(du��)�յؼ���ͨ���·��Ӱ�[J].��W(xu��)��(b��o),2005,26(5):581–585.
����[11]SunBY.Designandanalysisontheflexiblestructureoftheopticalreflectorbasedonthecomputeraidedengineering[J].Opto-ElectronicEngineering,2009,36(1):103–106.�O����.����CAE�Ĺ�W(xu��)�����R���ԽY(ji��)��(g��u)�O(sh��)Ӌ(j��)�c����[J].��늹���,2009,36(1):103–106.
����[12]ZhangYG,KouS,YuJJ,etal.Designandanalysisoftheprimarymirrorsubassemblyinastarsensor[J].AviationPrecisionManufacturingTechnology,2010,46(5):14–16.���y��,����,�ཨ܊,��.���������������R�M�����O(sh��)Ӌ(j��)�c����[J].���վ������켼�g(sh��),2010,46(5):14–16.
����[13]ZhangXJ,YuJJ,GuoXH,etal.DynamicanalysisofCCDdrawtubeofthelightweightspacecamera[J].MachineDesignandManufacturingEngineering,2008,37(5):27–30,34.���½�,�ཨ܊,����t,��.�p�Ϳ��gCCD���C(j��)�RͲ�Ą�(d��ng)���W(xu��)����[J].�C(j��)е�O(sh��)Ӌ(j��)�c���칤��,2008,37(5):27–30,34.
����[14]LiH,YuJJ,GuoXH,etal.Finite-elementanalysisofthereflectcomponentofanaerialspectralcamera[J].OpticalTechnique,2013,39(3):263–266.���,�ཨ܊,����t,��.���չ��V���C(j��)�����R����������Ԫ����[J].��W(xu��)���g(sh��),2013,39(3):263–266