0
发表咨询在线!

發(fā)布時(shí)間:2022-04-16所屬分類:計(jì)算機(jī)職稱論文瀏覽:1603次
摘 要: 摘 要:針對聽障兒童自我封閉等心理障礙,設(shè)計(jì)互動性與體驗(yàn)感較高的增強(qiáng)現(xiàn)實(shí)技術(shù)的聽障兒童智能玩具系統(tǒng),提高聽障兒童的互動興趣。構(gòu)建包含客戶端與服務(wù)器端的系統(tǒng)整體架構(gòu),通過客戶端的攝像機(jī)標(biāo)定與數(shù)據(jù)傳輸模塊,采集圖像并運(yùn)算攝像機(jī)內(nèi)外參數(shù),將圖像與外參數(shù)據(jù)向

摘 要:針對聽障兒童自我封閉等心理障礙,設(shè)計(jì)互動性與體驗(yàn)感較高的增強(qiáng)現(xiàn)實(shí)技術(shù)的聽障兒童智能玩具系統(tǒng),提高聽障兒童的互動興趣。構(gòu)建包含客戶端與服務(wù)器端的系統(tǒng)整體架構(gòu),通過客戶端的攝像機(jī)標(biāo)定與數(shù)據(jù)傳輸模塊,采集圖像并運(yùn)算攝像機(jī)內(nèi)外參數(shù),將圖像與外參數(shù)據(jù)向服務(wù)器端傳輸;服務(wù)器端的虛實(shí)融合模塊依據(jù)客戶端所傳輸?shù)膱D像與外參數(shù)據(jù),構(gòu)造背景貼圖并實(shí)時(shí)更新攝像機(jī)位置與角度,完成場景的虛實(shí)融合,并通過用戶交互模塊內(nèi)的運(yùn)動控制部分,實(shí)現(xiàn)聽障兒童對智能玩具移動與轉(zhuǎn)動等運(yùn)動的控制。實(shí)驗(yàn)結(jié)果表明,該系統(tǒng)的通信同步性與穩(wěn)定性較高,可實(shí)現(xiàn)對智能玩具的高精度控制,平均幀率可達(dá)到30.97 f/s,有效保障動態(tài)畫面呈現(xiàn)的流暢性,可為提高聽障兒童的互動興趣、消除自閉障礙提供有效幫助。
關(guān)鍵詞:智能玩具;增強(qiáng)現(xiàn)實(shí);聽障兒童;互動興趣;背景貼圖;虛實(shí)融合;運(yùn)動控制
0 引 言
聽障兒童因存在生理缺陷,造成他們在不同程度上的自我認(rèn)知能力不足,因此易出現(xiàn)情緒低落、壓抑及自我封閉等性格與心理上的缺陷,長此以往將導(dǎo)致聽障兒童在人際交往方面形成障礙[1] 。語言與聽力方面的缺陷造成他們更習(xí)慣通過視覺感受外界生活與認(rèn)知世界,因此針對聽障兒童所設(shè)計(jì)的智能玩具更應(yīng)注重視覺的沖擊與交互的體驗(yàn)[2] 。基于此設(shè)計(jì)的聽障兒童智能玩具,可調(diào)動聽障兒童的情緒,讓其注意力集中到同智能玩具的交互中,令他們產(chǎn)生深層次的感覺反應(yīng),并有效激發(fā)他們的學(xué)習(xí)興趣與潛能,消除聽障兒童的自我封閉等心理障礙,提高其人際交往能力[3⁃4] 。為實(shí)現(xiàn)此目的,需設(shè)計(jì)一種能夠?qū)崿F(xiàn)聽障兒童與智能玩具交互的系統(tǒng)。
基于 Mindstorms 的控制系統(tǒng)通過 UDP 協(xié)議完成控制機(jī)器人與 PC 的通信,并運(yùn)用 PD 實(shí)現(xiàn)控制,此系統(tǒng)的控制精度高,但其通信同步性與畫面呈現(xiàn)的流暢性較差[5] ;基于 WinCE 的控制系統(tǒng)通過遠(yuǎn)程調(diào)試模式與控制器相連,完成在示教器內(nèi)置的 WinCE操作系統(tǒng)下對機(jī)器人的控制,該系統(tǒng)畫面呈現(xiàn)的流暢性與通信同步穩(wěn)定性較佳,但控制精度略差[6] 。增強(qiáng)現(xiàn)實(shí)(Augmented Reality, AR)技術(shù)屬于一種采用計(jì)算機(jī)視覺技術(shù)對攝像機(jī)位置和角度進(jìn)行實(shí)時(shí)運(yùn)算,同時(shí)向真實(shí)圖像內(nèi)疊加計(jì)算機(jī)所生成的三維虛擬物體或二維圖像的技術(shù)[7⁃8] 。它不僅對虛擬現(xiàn)實(shí)技術(shù)的優(yōu)點(diǎn)予以很好的繼承,而且彌補(bǔ)了虛擬現(xiàn)實(shí)技術(shù)的缺陷之處,與虛擬現(xiàn)實(shí)技術(shù)相比,其展示效果更加真實(shí)[9] 。
綜合以上分析,本文設(shè)計(jì)一種基于 AR 技術(shù)的聽障兒童智能玩具系統(tǒng),該系統(tǒng)屬于一種虛擬智能玩具交互系統(tǒng),可實(shí)現(xiàn)對真實(shí)智能玩具的運(yùn)動狀況與各項(xiàng)功能的精準(zhǔn)演示,同時(shí)提供交互功能。該系統(tǒng)可通過虛擬智能玩具為聽障兒童提供更加絢麗的呈現(xiàn)效果,同時(shí)能夠代替真實(shí)智能玩具的功能,并帶來真實(shí)玩具無法提供的樂趣,提升了聽障兒童的互動能力與自我認(rèn)知能力。
1 基于 AR 技術(shù)的聽障兒童智能玩具系統(tǒng)
1.1 系統(tǒng)整體架構(gòu)
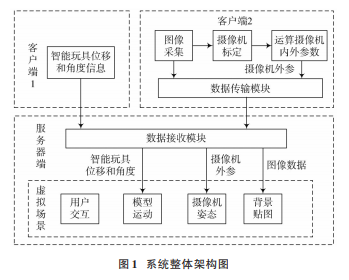
通過分析 AR 技術(shù)的聽障兒童智能玩具系統(tǒng)需求,運(yùn)用 C/S 架構(gòu)創(chuàng)建保護(hù)客戶端與服務(wù)器端的系統(tǒng)整體架構(gòu)。其中,客戶端的主要任務(wù)為采集圖像、標(biāo)定攝像機(jī)以及運(yùn)算場景信息等;服務(wù)器端的關(guān)鍵職責(zé)為搭建與渲染虛擬場景、智能玩具運(yùn)動控制、場景的虛實(shí)融合及用戶交互界面顯示等。系統(tǒng)的整體架構(gòu)如圖 1所示。圖 1 系統(tǒng)整體架構(gòu)圖依據(jù) AR 技術(shù)的聽障兒童智能玩具系統(tǒng)的現(xiàn)實(shí)應(yīng)用需求,劃分該系統(tǒng)的功能需求為基本功能需求與高級功能需求。其中,基本功能需求屬于該系統(tǒng)正常運(yùn)行的根本,采用標(biāo)定攝像機(jī)的方式將攝像機(jī)姿態(tài)確準(zhǔn),達(dá)到智能玩具場景虛實(shí)融合的目的;高級功能需求的重點(diǎn)為聽障兒童手動操控虛擬智能玩具漫游與指定漫游路線等交互功能。
1.2 系統(tǒng)功能模塊劃分與設(shè)計(jì)
1.2.1 攝像機(jī)標(biāo)定與數(shù)據(jù)傳輸模塊
通過采集一定量具有完整標(biāo)識圖的圖像實(shí)施攝像機(jī)標(biāo)定,運(yùn)算出攝像機(jī)的內(nèi)部參數(shù),以 XML 格式的文件儲存運(yùn)算內(nèi)部參數(shù)。通過讀取所運(yùn)算的內(nèi)部參數(shù),以采集的每幀圖像為依據(jù),對攝像機(jī)外部參數(shù)實(shí)施運(yùn)算,向服務(wù)器端發(fā)送運(yùn)算所得的攝像機(jī)外部參數(shù)及所采集的當(dāng)前幀圖像數(shù)據(jù)。繼續(xù)進(jìn)入下一幀,重復(fù)以上過程實(shí)施幀循環(huán)。通過 Socket實(shí)現(xiàn)數(shù)據(jù)傳輸,建立同服務(wù)器端的 TCP 連接后,分包發(fā)送每幀數(shù)據(jù),重復(fù)操作直至進(jìn)程完成或終止。攝像機(jī)標(biāo)定與數(shù)據(jù)傳輸模塊過程如圖2所示。
1.2.2 場景虛實(shí)融合模塊
此模塊主要包括虛擬場景搭建與場景虛實(shí)融合兩部分。系統(tǒng)以真實(shí)場景為依據(jù)完成虛擬環(huán)境的搭建,所搭建的虛擬場景內(nèi)主要包含:智能玩具三維模型、虛擬攝像機(jī)、模型材質(zhì)、場景光源及虛擬地面等。另外,將自動漫游功能加入到虛擬智能玩具內(nèi),令其可在虛擬環(huán)境下實(shí)施漫游展示。
客戶端傳輸?shù)臄z像機(jī)外部參數(shù)數(shù)據(jù)與圖像數(shù)據(jù)由服務(wù)器端的數(shù)據(jù)接收模塊接收;通過格式變換接收到的圖像數(shù)據(jù),將格式變換后的圖像數(shù)據(jù)當(dāng)作當(dāng)前幀的背景貼圖;采用接收到的攝像機(jī)外部參數(shù)運(yùn)算出攝像機(jī)的位姿和角度,依據(jù)運(yùn)算結(jié)果對當(dāng)前幀的攝像機(jī)姿態(tài)實(shí)施設(shè)置;進(jìn)入下一幀循環(huán)執(zhí)行以上過程,將融合了真實(shí)場景和虛擬場景的感官效果展現(xiàn)給聽障兒童。場景虛實(shí)融合過程如圖 3所示。
1.2.3 用戶交互模塊
在以上兩個(gè)模塊的基礎(chǔ)上,設(shè)計(jì)包含智能玩具運(yùn)動控制、指定運(yùn)動路徑兩部分的用戶交互模塊,將更好的 沉浸感與真實(shí)感提供給聽障兒童[10] 。用戶交互模塊結(jié)構(gòu)如圖 4所示。
通過用戶交互模塊中的運(yùn)動控制部分,聽障兒童可實(shí)現(xiàn)以鍵盤、鼠標(biāo)或其余輸入設(shè)備控制智能玩具轉(zhuǎn)動和移動;通過該模塊中的指定運(yùn)動路徑部分可實(shí)現(xiàn)屏幕的拾取功能,比如聽障兒童通過鼠標(biāo)指定虛擬環(huán)境中的某個(gè)點(diǎn),系統(tǒng)能夠檢測到該指定點(diǎn)的位置,并令智能玩具依據(jù)檢測到的指定點(diǎn)位置運(yùn)動[11⁃12] 。
1.4 場景虛實(shí)融合
通過設(shè)置背景貼圖,并對攝像機(jī)位置和角度予以實(shí)時(shí)更新,能夠令虛擬場景和真實(shí)場景接近一致,實(shí)現(xiàn)場景的虛實(shí)融合[13] 。
1.4.1 背景貼圖構(gòu)造
融合虛擬場景和真實(shí)場景為 AR 技術(shù)的關(guān)鍵,以此實(shí)現(xiàn)將虛擬物體或圖像向?qū)嶋H環(huán)境內(nèi)真實(shí)疊加的效果[14] ,故應(yīng)將由攝像機(jī)采集的圖像當(dāng)作虛擬場景的背景貼圖。通過運(yùn)用輔助攝像機(jī)的深度渲染層次,在場景內(nèi)構(gòu)造背景貼圖。以深度值為依據(jù)由高到低對物體實(shí)施渲染,即為整個(gè)虛擬場景內(nèi)的渲染順序。設(shè)背景貼圖的深度值為-1,其他場景元素的深度值均為 1,場景中主攝像機(jī)的采集區(qū)間設(shè)為深度值≥1,輔助攝像機(jī)的采集區(qū)間設(shè)為深度值≤-1,如此整個(gè)虛擬場景內(nèi)除了背景貼圖之外的其余場景元素均由主攝像機(jī)實(shí)施成像,輔助攝像機(jī)僅對背景貼圖實(shí)施成像。當(dāng)對每幀圖像實(shí)施渲染時(shí),應(yīng)先對整個(gè)虛擬場景內(nèi)深度值高的部分實(shí)施渲染,再對深度值低的背景貼圖實(shí)施渲染,獲得背景貼圖置于整個(gè)虛擬場景之后的最終效果。
1.4.2 數(shù)據(jù)接收與場景更新
完成背景貼圖構(gòu)造后,在場景對每幀實(shí)施渲染,通過監(jiān)聽端口接收的圖像數(shù)據(jù)對背景貼圖實(shí)施更新,同時(shí)對虛擬攝像機(jī)的位置與角度予以實(shí)時(shí)調(diào)整[15] 。場景更新過程如圖 5 所示。采用 New Thread 構(gòu)建子線程,在子線程內(nèi)開啟監(jiān)聽端口實(shí)施監(jiān)聽。當(dāng)子線程監(jiān)聽端口接收到圖像數(shù)據(jù)后,對其實(shí)施相應(yīng)的坐標(biāo)轉(zhuǎn)換;通過 GPU 操作依次設(shè)定相對位置像素的三通道值,避免了單個(gè)設(shè)置各個(gè)像素值運(yùn)行效率低的問題;向 Color 數(shù)組內(nèi)存儲每個(gè)圖像的全部像素值,再對當(dāng)前幀的背景貼圖像素值實(shí)施設(shè)置。
1.5 智能玩具運(yùn)動控制
為實(shí)現(xiàn)對智能玩具的運(yùn)動控制,需通過客戶/服務(wù)器模式并基于 TCP/IP 協(xié)議設(shè)計(jì)反饋式增量控制方法,其中,客戶端與服務(wù)器端分別為下位機(jī)與上位機(jī)。具體控制過程如圖 6所示。
具體控制步驟為:
1)由下位機(jī)發(fā)出連接請求。
2)上位機(jī)對下位機(jī)發(fā)出的連接請求實(shí)施監(jiān)聽。
3)當(dāng)上位機(jī)監(jiān)聽到來自下位機(jī)發(fā)出的連接請求后,若未給予應(yīng)答,則返回步驟 1);若下位機(jī)得到上位機(jī)的連接應(yīng)答,則繼續(xù)。
4)下 位 機(jī) 對 智 能 玩 具 當(dāng) 下 的 位 置 數(shù) 據(jù) { E, A1 , A2 ,…, A5 }進(jìn)行讀取,其中 A1~A5 表示智能玩具的 5 個(gè)旋轉(zhuǎn)自由度,E 表示智能玩具的整體平移自由度,并以數(shù)據(jù)包格式將其封裝之后向上位機(jī)發(fā)送。
5)當(dāng)上位機(jī)將來自下位機(jī)的數(shù)據(jù)包接收到之后,以設(shè)定的運(yùn)動軌跡為依據(jù),對智能玩具運(yùn)動自由度下一幀的位移增量{ ΔE,ΔA1 ,ΔA2 ,…,ΔA5 }實(shí)施運(yùn)算,并以指令格式將其封裝發(fā)往下位機(jī)。
6)下位機(jī)接收到來自上位機(jī)的指令數(shù)據(jù)之后,將智能玩具各自由度的位移增量數(shù)據(jù)提取出,并依據(jù)設(shè)定的增量驅(qū)動智能玩具運(yùn)動。
相關(guān)知識推薦:論文發(fā)表國際期刊快嗎
7)下位機(jī)對通信是否斷開實(shí)施檢測,若未斷開則轉(zhuǎn)至步驟 4);反之,則轉(zhuǎn)至步驟 1)。
2 實(shí)驗(yàn)結(jié)果分析
以某公司生產(chǎn)的智能玩具為實(shí)驗(yàn)對象(如圖 7 所示),檢驗(yàn)本文系統(tǒng)的綜合性能。選取基于 Mindstorms 的智能機(jī)器人控制系統(tǒng)與基于 WinCE 的開放式 6R 工業(yè)機(jī)器人控制系統(tǒng)作為本文系統(tǒng)的對比系統(tǒng),兩個(gè)對比系統(tǒng)分別為參考文獻(xiàn)[5⁃6]系統(tǒng),將實(shí)驗(yàn)智能玩具分別用于三個(gè)系統(tǒng)中,對比分析各系統(tǒng)的綜合性能。系統(tǒng)測試環(huán)境為:
1)服務(wù)器端:Microsoft SQL Server 2014 數(shù)據(jù)庫、 Windows Server 2016 服 務(wù) 器 操 作 系 統(tǒng) 、Power Builder 9.1及 IIS 6.1信息服務(wù)管理工具。
2)客戶端:Windows 10、Power Builder 9.1、IE10 及以上版本瀏覽器。
2.1 通信同步性分析
對于在交互過程中實(shí)施對實(shí)驗(yàn)智能玩具的運(yùn)動控制時(shí),上位機(jī)與下位機(jī)的通信同步性尤為重要,同步性越高則智能玩具對交互過程中的運(yùn)動控制反映越靈敏,如此能夠有效提升聽障兒童交互時(shí)的真實(shí)體驗(yàn)。在此通過通信頻率對三個(gè)系統(tǒng)的通信同步性實(shí)施檢測與分析,所得檢測結(jié)果如圖 8所示。通過圖 8能夠得出,本文系統(tǒng)與 WinCE 系統(tǒng)隨通信周期的增加,通信頻率并未出現(xiàn)顯著波動,而 Mindstorms 系統(tǒng)的通信頻率波動現(xiàn)象較為明顯;本文系統(tǒng)的整體通信頻率明顯高于其他兩個(gè)系統(tǒng),由此可見,本文系統(tǒng)與 WinCE 系統(tǒng)的通信同步穩(wěn)定性更好,本文系統(tǒng)的通信同步性更高。
2.2 運(yùn)動控制性能分析
分別將三個(gè)系統(tǒng)中所用的攝像機(jī)依次安裝于實(shí)驗(yàn)智能玩具上,對比各系統(tǒng)交互過程中控制實(shí)驗(yàn)智能玩具時(shí)的運(yùn)動控制誤差。統(tǒng)計(jì)各系統(tǒng)運(yùn)動控制過程中,實(shí)驗(yàn)智能玩具的實(shí)際軌跡和設(shè)計(jì)軌跡間的誤差,以此對比各系統(tǒng)的運(yùn)動控制誤差。分別對比 x,y,z三個(gè)平移方向的誤差,對比結(jié)果如圖 9所示。由圖 9可知,在本文系統(tǒng)控制下,實(shí)驗(yàn)智能玩具的 x,y,z 三個(gè)方向的平均位移誤差依次為 1.96 mm、0.69 mm、0.75mm,三個(gè)方向的最大誤差依次為 2.41mm、0.98 mm、1.12 mm;在 Mindstorms 系統(tǒng)控制下,實(shí)驗(yàn)智能玩具的 x,y,z 三個(gè)方向的平均位移誤差依次為 3.08 mm、1.76 mm、1.68 mm,三個(gè)方向的最大誤差依次為 3.86 mm、2.12 mm、2.47 mm;在 WinCE 系統(tǒng)控制下,實(shí)驗(yàn)智能玩具的 x,y,z 三個(gè)方向的平均位移誤差依次為 5.47 mm、2.78 mm、2.71 mm,三個(gè)方向的最大誤差依次為 6.23 mm、3.66 mm、3.56 mm。由此說明,本文系統(tǒng)對實(shí)驗(yàn)智能玩具的運(yùn)動控制誤差更低,能夠更好地實(shí)現(xiàn)智能玩具的實(shí)際運(yùn)動軌跡與設(shè)計(jì)運(yùn)動軌跡重合,控制效果好、精準(zhǔn)度高、控制性能優(yōu)越。
2.3 流暢性能測試
為進(jìn)一步檢驗(yàn)本文系統(tǒng)對動態(tài)畫面呈現(xiàn)的流暢性能,現(xiàn)對三個(gè)系統(tǒng) 30 s內(nèi)背景貼圖更新的幀率狀況實(shí)施分析圖 10中各系統(tǒng)的測試結(jié)果能夠得出,在實(shí)施背景貼圖更新過程中,本文系統(tǒng)與 WinCE 系統(tǒng)的平均幀 率分別為30.97 f/s和25.55 f/s,明顯高于Mindstorms系統(tǒng) 15.33 f/s 的平均幀率,可見本文系統(tǒng)與 WinCE 系統(tǒng)對于動 態(tài) 畫 面 的 流 暢 顯 示 能 夠 給 予 更 有 效 的 保 障 ,而 Mindstorms 系統(tǒng)在呈現(xiàn)動態(tài)畫面的流暢性方面稍顯薄弱。
綜合以上 3 組實(shí)驗(yàn)測試結(jié)果可知,本文系統(tǒng)在通信同步性、運(yùn)動控制性能及流暢性能三方面的綜合表現(xiàn)更為優(yōu)越,具有非常好的實(shí)時(shí)交互性能,能夠有效提升聽障兒童與智能玩具的互動體驗(yàn)感和互動性。
3 結(jié) 語
本文設(shè)計(jì)了一種基于 AR 技術(shù)的聽障兒童智能玩具系統(tǒng),針對聽障兒童在互動與人際交往等方面的缺陷,提供一種可實(shí)現(xiàn)聽障兒童與智能玩具間實(shí)時(shí)交互的系統(tǒng)。通過 AR 技術(shù)的虛實(shí)融合,實(shí)現(xiàn)向真實(shí)環(huán)境中疊加虛擬物體或圖像的目的,為聽障兒童提供一個(gè)逼真的虛擬交互場景,并結(jié)合運(yùn)動控制方法實(shí)現(xiàn)聽障兒童對智能玩具的運(yùn)動控制,提升交互效果,令聽障兒童在交互過程中激發(fā)對智能玩具的興趣,消除其自我封閉與壓抑等情緒,逐步提升聽障兒童的互動能力與人際交往能力。通過實(shí)驗(yàn)測試可知,本文系統(tǒng)具有較高的通信同步性能,通信穩(wěn)定性較好,能夠?qū)崿F(xiàn)對智能玩具的有效控制,控制精度高,同時(shí)可有效保障所呈現(xiàn)動態(tài)畫面的流暢性,提升聽障兒童的真實(shí)體驗(yàn)感。——論文作者:周玉翠,毛澤民
參 考 文 獻(xiàn)
[1] 王秀麗,蔣曉,趙丹琳,等 .基于具身認(rèn)知的兒童智能玩具交互設(shè)計(jì)研究[J].包裝工程,2019,40(16):165⁃170.
[2] 趙柵凌 . 聾人文化視域下聽障兒童音樂教育現(xiàn)狀的審視與突圍[J].四川戲劇,2019(7):161⁃164.
[3] 陳麗蘭,王雁,肖少北 . 智力在聽障兒童信息加工速度與數(shù)量加工間的中介作用[J]. 中華行為醫(yī)學(xué)與腦科學(xué)雜志,2019,28 (10):925⁃929.
[4] 汪梅梅,劉晉宣,萬勤,等 .不同視聽提示方式對學(xué)齡前聽障兒童嗓音基頻的影響[J]. 聽力學(xué)及言語疾病雜志,2018,26(6): 624⁃627.
[5] 程翀,郭曉彬,陳祥磊,等 .基于 Mindstorms 的智能機(jī)器人控制系統(tǒng)開發(fā)[J]. 武漢理工大學(xué)學(xué)報(bào)(交通科學(xué)與工程版),2018, 42(2):247⁃252.
[6] 王振華,許琳娜,蘭雪艷 .基于 WinCE 的開放式 6R 工業(yè)機(jī)器人控制系統(tǒng)研究與開發(fā)[J]. 組合機(jī)床與自動化加工技術(shù),2018 (6):76⁃80.
[7] 張海森,楊光輝,劉超見,等 .基于 AR 技術(shù)的跨平臺移動終端的輔助學(xué)習(xí)系統(tǒng)[J].圖學(xué)學(xué)報(bào),2018,39(1):85⁃90.
[8] 伊鵬,劉衍聰,石永軍,等 .基于增強(qiáng)現(xiàn)實(shí)技術(shù)的工程圖學(xué)移動端教學(xué)系統(tǒng)設(shè)計(jì)與開發(fā)[J].圖學(xué)學(xué)報(bào),2018,39(6):1207⁃1213.
[9] 滕健,萬福成 . 基于增強(qiáng)現(xiàn)實(shí)的產(chǎn)品展示 APP 設(shè)計(jì)研究[J]. 包裝工程,2017,38(14):219⁃223.
[10] 吳群彪,方海峰,范紀(jì)華,等 .基于 VR/AR 技術(shù)的機(jī)械課程教學(xué)方法探索[J].機(jī)械設(shè)計(jì),2018,35(z2):432⁃434.
[11] 劉子建,李欣 . 基于增強(qiáng)現(xiàn)實(shí)技術(shù)的兒童數(shù)字化閱讀產(chǎn)品設(shè)計(jì)[J].包裝工程,2019,40(8):197⁃203.
[12] 田元,周冪,夏丹,等 . 基于移動增強(qiáng)現(xiàn)實(shí)的學(xué)齡前兒童教育游戲研究與設(shè)計(jì)[J].電化教育研究,2019,40(4):68⁃75.
[13] 張四方,江家發(fā) . 科學(xué)教育視域下增強(qiáng)現(xiàn)實(shí)技術(shù)教學(xué)應(yīng)用的研究與展望[J].電化教育研究,2018,39(7):64⁃69.
[14] 楊家博,楊剛,楊猛 .基于深度圖像分割與物體跟蹤的增強(qiáng)現(xiàn)實(shí)系統(tǒng)[J].系統(tǒng)仿真學(xué)報(bào),2017,29(11):2788⁃2795.
[15] 張志利,王超,龍勇,等 .基于核相關(guān)濾波器無標(biāo)識 AR 的目標(biāo)跟蹤仿真[J].系統(tǒng)仿真學(xué)報(bào),2018,30(11):4462⁃4468.
声明:①文献来自知网、维普、万方等检索数据库,说明本文献已经发表见刊,恭喜作者.②如果您是作者且不想本平台展示文献信息,可联系学术顾问予以删除.


