�l(f��)���r�g��2020-02-22���ٷ���r(n��ng)�I(y��)Փ���g�[��1��
ժ Ҫ�� ժҪ:ᘌ�Ŀǰľ���ի@�C(j��)���ھ����I(y��)��ľ��K��𤸽���������Ć��}���Y(ji��)�ϸ����ܵ�Ȯֺ�ͷ����ھ��P�����Ƴ�һ�N���\(y��n)�����?zh��n)��Y���b�á���B�˺Y���b�õĽY(ji��)��(g��u)�M�ɺ���ԭ����ͨ�^�������C(j��)�߹�����B(t��i)���о���������������Փ�������_�������\(y��n)�Y�U�����������P(gu��n)
����ժҪ:ᘌ�Ŀǰľ���ի@�C(j��)���ھ����I(y��)��ľ��K��𤸽���������Ć��}���Y(ji��)�ϸ����ܵ�Ȯֺ�ͷ����ھ��P�����Ƴ�һ�N���\(y��n)�����?zh��n)��Y���b�á���B�˺Y���b�õĽY(ji��)��(g��u)�M�ɺ���ԭ����ͨ�^�������C(j��)�߹�����B(t��i)���о���������������Փ�������_�������\(y��n)�Y�U�����������P(gu��n)�I�����Ĺ�������(sh��)���õ���Ӱ��������x����Ҫ���أ�������SolidWorksܛ���������C(j��)���M(j��n)�������S��ģ���������ʡ������ʡ������ʼ����a(ch��n)Ч������ԓ�b�ù������ܵĜyԇָ��(bi��o)�M(j��n)�����gԇ�(y��n)���Y(ji��)������:��(d��ng)�C(j��)��ǰ�M(j��n)�ٶȞ�1.2m/s���Y�U���\(y��n)�ٶȞ�1.3m/s���������D(zhu��n)�ٞ�205r/min�r�������ʞ�93.8%�������ʞ�2.5%���ڃ��ʞ�98.7%�����a(ch��n)Ч�ʞ�0.38hm2/h�������b�õĹ������ܷ�(w��n)���ɿ����܉�M��Y�����I(y��)��Ҫ��
�����P(gu��n)�I�~:ľ���ի@�C(j��);�Y���b��;�������x;������;���S��ģ
����0����
����ľ���������������������֮һ����һ�N�V�������ڟᎧ�����Ꭷ�^(q��)����Ҫ�Zʳ�����������Դ���|(zh��)[1]��ľ��Ҳ���҇����ϡ��V�|�͏V���ȵ^(q��)��һ�N��Ҫ��(j��ng)��(j��)������҇���������e��������[2]��ľ���ęC(j��)е���ի@��ľ���a(ch��n)�I(y��)�����P(gu��n)�I�h(hu��n)��(ji��)��߀���Ԏ���ľ����߅���a(ch��n)�h(hu��n)��(ji��)�ęC(j��)е��(��Nֲ�C(j��)е��������C(j��)е����[3])���Ķ��������������ľ���a(ch��n)�I(y��)�����a(ch��n)Ч�ʣ������M(j��n)�҇��Ꭷ�^(q��)ľ���Nֲ�a(ch��n)�I(y��)���l(f��)չ�M(j��n)�����˷e�O���Ƅ�����[4]��
����Ŀǰ������l(f��)�_(d��)���Ҷ���ô���ľ��(li��n)���ի@�C(j��)�M(j��n)�д���e���ի@���I(y��)�����ж�N���༉��ݔ�ͷ��x�b�ã��������xЧ���^�ã�������Ĵ���ľ���ի@�C(j��)���m���҇��Ꭷ�^(q��)������ɫ��С�؉K���I(y��)[5]���҇�ľ��C(j��)е���ի@��ʽ��Ҫ���÷ֶ��ի@���ի@�C(j��)е����^�࣬���ի@���I(y��)�|(zh��)����e�^����Ҫ���}���F(xi��n)���������xЧ��������ʵͼ������ʸߵ�[6]��
�������]��x���r(n��ng)�C(j��)�����м��QՓ�İl(f��)��ƪ
����ᘌ��������}���n�}�M��ľ���ի@�ĸ����h(hu��n)��(ji��)�M(j��n)���˼��g(sh��)�{(di��o)�У�����(j��)ľ���Nֲ���ի@Ҫ�Y(ji��)��ľ���Nֲ���r(n��ng)ˇҪ��[7]���O(sh��)Ӌ��һ�N���ж����?zh��n)��Y���b�õ�ľ���ի@�C(j��)�����_����ԓ�b�õĽY(ji��)��(g��u)�M�ɺ���Ҫ����(sh��)������m(x��)����������x�b�õ��O(sh��)Ӌ�ṩ������
����1���C(j��)�Y(ji��)��(g��u)������ԭ��
����1.1ľ���Nֲ�r(n��ng)ˇҪ��
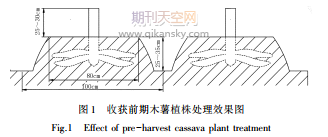
����ľ����Ҫ�Nֲ�ڵ،�������|(zh��)���ɡ��ɹ�ȡ���ˮ���á��ЙC(j��)�|(zh��)����S����ɰ������[8]���ڲ�ֲǰ����Ҫ�������M(j��n)�и���30cm����;���������_�����ſ����������c���՚�Ľ��|��e���ܹ���e�^���Ӵ����?x��)�ҹ�ز������ľ��K�����γ��c��ŵĸ߶��c����һ�����(j��)�ݡ����|(zh��)������r������ͨ���Ō�����80��100cm���Ÿ�25��35cm��������ˮ������ƽ̹�ء�ɽ�_�ء�ճ�|(zh��)�صȣ����ő�(y��ng)��Щ���Ō��m��(d��ng)�sС��������ˮ���n;������ˮ�^�õ�ɽ�ء��µء���ˮ�����ɰ�|(zh��)���أ��������Եͼ��Ԍ������ڷ�����ˮ���C(j��)е�ի@ǰ�茦ľ��ֲ���M(j��n)��ǰ��̎����Ч���D��D1��ʾ��
����1.2�Y(ji��)��(g��u)�M�ɼ���Ҫ���g(sh��)����(sh��)
����ľ���ի@�C(j��)��Ҫ�ɑҒ�C(j��)�ܡ������ھ��P��ݔ�ͷ��x�b�á��ռ{�估���әC(j��)��(g��u)�ȽM�ɣ���D2��ʾ��
������Ҫ���g(sh��)����(sh��)����:
�������C(j��)�|(zh��)��/kg:280
�������ׄ���/kW:43.0
������������/mm:1000
�����ھ����/mm:150��350(��Փ)
�������I(y��)�ٶ�/km·h-1:1.12��2.72
�������I(y��)�Ŕ�(sh��)/��:1
����1.3����ԭ��
���������C(j��)ͨ�^���c(di��n)�Ғ췽ʽ����ľ���ի@�C(j��)ǰ�M(j��n)�������C(j��)β����ݔ���S����ͨ�^�f��(ji��)(li��n)�S���c�X݆���ݔ���S���B���������f�o�X݆��[9]������朂��ӷ�ʽ���X݆��Ą������·��䵽�ŗlʽ�]�ϻ��D(zhu��n)�(q��)�әC(j��)��(g��u)�Ͷ��әC(j��)��(g��u)�����I(y��)�r���������C(j��)�����£������ھ��P�ڳ�ľ��K���������Ļ����[10]��ͨ�^�єD���ã�ʹ�û���ﱻ�ȶєD�����x�b�����̎;�ŗlʽ�]�ϻ��D(zhu��n)�Y�����\(y��n)��(q��)��݆�Ͷ���݆�Ļ��D(zhu��n)���܉�?q��)��F(xi��n)��������M(j��n)�����\(y��n)ݔ�͡��Y�ֳ��s��Ŀ��;𤸽��ľ��K����Ƥ�ϵ����K���ڻ����֮�g�����ƔDĦ�����ŗl�������ײ�^���аl(f��)�����w�����w���С���K�����������������½�(j��ng)�^�ŗl֮�g�Ŀp϶�������棬���x���ľ��K�����^�m(x��)�S�����\(y��n)�Y�\(y��n)����ԓ�b�ú��ռ{���(n��i)���y(t��ng)һ�ռ���
����2�P(gu��n)�I�����Y(ji��)��(g��u)�O(sh��)Ӌ
����2.1�C(j��)�ܵ��O(sh��)Ӌ
�����C(j��)����ľ���ի@�C(j��)�������֧�νY(ji��)��(g��u)�������d�������C(j��)е���I(y��)�r�������d�ɡ����b�ڙC(j��)���ϵIJ�����Ҫ�з����ھ��P��朂��әC(j��)��(g��u)���ŗlʽ�]�ϻ��D(zhu��n)�Y����݆���ռ{��ȡ��ڱ��C���������bλ�Ü�(zh��n)�_��ǰ���£��O(sh��)Ӌ��Ӌ��������ęC(j��)�ܽY(ji��)��(g��u)�ͅ���(sh��)����ߙC(j��)�ܵ����w������(qi��ng)�ȣ��M���ܵp�p���C(j��)�|(zh��)���Խ��������C(j��)����;�C(j��)�ܵijߴ��С߀ȡ�Q��ľ���Nֲ���r(n��ng)ˇҪ��[5]���C���������O(sh��)Ӌ�ęC(j��)�ܳߴ��1800mm×1100mm×1050mm(�L×��×��)�����Ӳ��Ϟ�80mm×80mm×5mm�ľ��η�䓣���D3��ʾ��
����2.2�����ھ��P���O(sh��)Ӌ
����Ŀǰ��������ľ���ھ���ھ��P��3�N�������������P���ŗlʽ�ھ��P�Ͷ��Aʽ�ھ��P��3�N�P������������ȱ�c(di��n):���������P�������y�����Ĵ�;�ŗlʽ�ھ��P����������(qi��ng)���^�͡�����׃��;���Aʽ�ھ��P�����������������y�Ć��}[11]���������O(sh��)Ӌ���H��������ھ��P���������������ܣ����Cľ��K�����ի@�|(zh��)����߀�ܜp�����C(j��)�������ģ������ի@�ɱ�����ˣ�����(j��)�����W(xu��)ԭ�����O(sh��)Ӌ��һ�N��������A��@Ȯǰצ�ķ����P�����нY(ji��)��(g��u)���Ρ������Ը������Ժõ����c(di��n)��ԓ�����ھ��P��6����ͬ�������P�X���ŽM�ɣ����Ϟ�65Mn䓣��ھ��P�ɂ�(c��)�Qֱ�P�������а��b�ף����������{(di��o)��(ji��)���b�߶ȣ����m��(y��ng)��ͬ�^(q��)������ھ���D4��ʾ��
����һ����r�£�ͨ�^������ȡ������������X�����X�༰�����A��5������(sh��)��y�u�ھ��P�Ĺ�������[12]������(j��)ľ��K�����������ԣ����˱��C�K���������ұ��������ѷe���O(sh��)Ӌ�ھ��P��������Ȟ�30cm;����(j��)ľ���Nֲ���r(n��ng)ˇҪ���˱��C�K���ڱM���ھ��P�Ĺ���������100cm;���˱��C�����P�������õ������ԣ��O(sh��)Ӌ�Xǰ�˳ʼ�(x��)խ��;���˱��C�X�ڳ��m(x��)��������һ���ij��d��(qi��ng)�ȣ��O(sh��)Ӌ�X��˳ʴ���;���ˌ��ھ������Ļ�����M(j��n)�Ќ�(d��o)�����������P�X֮�g�O(sh��)��һ���Ŀ�϶���ڙC(j��)е��ӵ������£����Լ��r���䲿����������K���p�p���m(x��)���������\(y��n)���ӷ��x������
����2.3���x�b�õ��O(sh��)Ӌ
���������?zh��n)��Y���b����Ҫ�ɖŗlʽ�]�ϻ��D(zhu��n)�Y���(q��)��݆�����݆����(d��o)����݆������݆��朂��әC(j��)��(g��u)�ȽM��[13]����D6��ʾ������Ҫ���ľ��K���c�����Ȼ�����ݔ�ͺͷ��x��������K�õ�δ����������������ճ���ĉK����
�������]��ľ��K�������������������܉�������ݔ�;��x��(n��i)ʹ��ľ��K���������������xЧ����ѣ��O(sh��)Ӌݔ���г̞�1375mm��ݔ�͌���1000mm�����\(y��n)�ŗl�U�g��41mm�����˱��C�ŗlʽ�]�ϻ��D(zhu��n)�Y����һ���ij��d�������\(y��n)��(qi��ng)�ȣ��ŗl�U�IJ����x��ֱ��13mm�ĈA䓡��ŗlʽ�]�ϻ��D(zhu��n)�Y�Ĺ������������ɵ��g��Ėŗl�U�M�ɵ�һ���B�m(x��)�ƄӵĺY�棬�ŗl�U�T���ڃɸ�ƽ��ͬ�����ϣ����(q��)��݆���D(zhu��n)�����S��ͬ����һ���\(y��n)�ӡ�
����������Ƕ����b��������Ҫ�ĽM�ɲ��֣�����������������Ҫ������Դ[14]�����IJ��ÃɌ����݆�M����ʽ�M(j��n)���O(sh��)Ӌ����������S���͈D��D7��ʾ�������^���У��������߅�Ķ���݆ͨ�^朂����S�(q��)��݆��ͬ�A���ٶȵ��D(zhu��n)�ӣ�������������½��挢ͬ������𣬲��c֮�a(ch��n)���������ã�ʹ�����Y�治��ؿv�ӣ��_(d��)����������M(j��n)����ײ���x���á��@�N������Y(ji��)��(g��u)���Σ�������(qi��ng)�ȴ������D(zhu��n)�ٵ��{(di��o)����׃��ʧЧ�������_(d��)����ѵĺY��Ч���������Y���c����ăA���{(di��o)����8°����D8��ʾ��
������(d��ng)���D(zhu��n)�Y�ľ��ٶ��^��r���������ڹ����Y���ϰl(f��)���������ӵĬF(xi��n)�����ڷ��x����ѻ��D(zhu��n)�Y���ٶȿɸ���(j��)���D(zhu��n)�Y���ٶ�V�c�C(j��)�M���I(y��)�ٶ�V0�ı�ֵλ=V/V0=0.8��2.3ms�_�������ڟᎧ�^(q��)�����|(zh��)�����|(zh��)����������ݔ�͎��ٴ_����V=1.3m/s��
����3�����gԇ�(y��n)�c�Y(ji��)��(g��u)����
����ԇ�(y��n)����ҪĿ������һ���r�g�l���y��ľ���ի@�C(j��)��ʹ����r�������^(q��)�m��(y��ng)�ԡ��������Լ��������ܵȣ���ͨ�^�y��ľ���ă����ʡ������ʡ������ʁ��Д�ԓľ���ի@�C(j��)������[10]��
����ԇ�(y��n)��2018��5���ں��ϴ�W(xu��)�������ĸ�����ԇ�(y��n)���M(j��n)�У���(d��ng)��Ŀ��^ԇ�(y��n)�l�����1��ʾ�����Ȍ�ľ��ֲ���M(j��n)��ǰ��̎������ͨ�^�˹����I(y��)��ʽ���x��30cm���ϵ�ľ���o���г���ԇ�(y��n)�C(j��)�ߞ鱾�n�}�M���Ƶ����\(y��n)�?zh��n)��������x�C(j��)����ԓ���x�C(j��)�Ғ������֚W��M804-A݆ʽ�����C(j��)�ϡ�����(j��)��(sh��)�H���I(y��)��r���C(j��)�M���I(y��)�ٶ��O(sh��)�Þ�1.2m/s��
����ԇ�(y��n)��ͬһ���C(j��)�����M(j��n)�У����g�S�C(j��)�xȡ5��ԇ�(y��n)�^(q��)��ÿ��ԇ�(y��n)�^(q��)�L�Ȟ�30m�����Ȟ�1.2m����ԇ�(y��n)��(sh��)��(j��)ӛ䛲�������ԇ�(y��n)������D9��ʾ��ԇ�(y��n)�Y(ji��)�����2��ʾ��
����4�Y(ji��)Փ�cչ��
����1)�O(sh��)Ӌ�����Ƴ����������ݔ�롢�����ھ��P�������?zh��n)��������x�b�á�ľ��K���ռ{����һ�w��ľ���ի@�C(j��)����(sh��)�F(xi��n)��ľ���ի@�ęC(j��)е�����I(y��)��
����2)���gԇ�(y��n)�Y(ji��)������:���I(y��)�ٶȞ�1.2m/s�r�������ʸ��_(d��)93.8%�������ʃH��2.5%���ڃ��ʸ��_(d��)98.7%�����a(ch��n)Ч�ʞ�0.38%����ԇ�(y��n)�Y(ji��)��ֵ�������A(y��)��ֵ���f��ԓ�C(j��)���I(y��)���ܷ�(w��n)���ɿ������I(y��)�|(zh��)���^�ߣ�����ľ���ի@�ļ��g(sh��)Ҫ��
����3)�ڴԇ�(y��n)ƽ�_�^���У�ľ���o����Ҫ��ǰ���г�̎�����M(f��i)�r�M(f��i)�����ں��m(x��)���O(sh��)Ӌ�п��Կ��]���ھ�C(j��)ǰ�˼������D(zhu��n)�и�b�ü�ľ���o��䁷��ռ��b�ã��p���˹��ڄӏ�(qi��ng)�ȡ�