�l���r�g��2022-03-03���ٷ���Ƽ�Փ���g�[��1��
ժ Ҫ�� ժҪ: Ŀǰ�����΄ն�������һЩΣ�U�^��·�r���s���C���˲ɼ���Ϣ��y�����a���ɔ_; ᘌ��@һ���}���OӋ����o�E���ӞV������Ϣ�ں�˼�뵽�����C���˵��OӋ�У��о��F�еij����C���˵�ȱ�ݣ������OӋ��һ�N�����C���˵ı��w�Y���������˸��N�ǽ��|ʽ�������IJ���
����ժҪ: Ŀǰ�����΄ն�������һЩΣ�U�^��·�r���s���C���˲ɼ���Ϣ��y�����a���ɔ_; ᘌ��@һ���}���OӋ����o�E���ӞV������Ϣ�ں�˼�뵽�����C���˵��OӋ�У��о��F�еij����C���˵�ȱ�ݣ������OӋ��һ�N�����C���˵ı��w�Y���������˸��N�ǽ��|ʽ�������IJ��ֽY����������ṩ����Ĕ�����Դ; �OӋ�˟o�E�V������Ϣ�ںϼ��g����Q�����ⲿ���s�h����ij��������Ϣ���ڵ���Ϣ�ɔ_; ���Ϻ�ij������Ϣ��˾�ij����C�����M�Ќ��H�Ĝyԇ�������������C���ˡ�YJV22 - 3* 300 ��|���䏝��ֱ����2. 5 m��ʹ��ʯ��ģ�M�ĸ���������ȣ�������Ђ������ɼ��Ĕ������^�����A̎����ʹ�� Matlab 7. 0 �����M�Мʴ_�ʷ��棬����Y���������@�N�����C���˵ı��Ϝʴ_�ʸ��_ 96. 3% ���ڂ������p�ĺ�ģ�ͻ֏͵��ӕr�����^ 3 s���Y���������@��
�����P�I�~: �����C����; ��Ϣ�ں�; �o�E���ӞV��
����0 ����
����ݔ늾�·������늾W�ܵ���Ȼ�ĺ��ij�Ҋ��ʽ���@�N�ĺ������������l�����U������eͣ늵ȱ����¹ʣ��o늾W�İ�ȫ�\���c�˂����ճ��������Σ������Щ�꣬�҇���ݔ늾�·�ܵ��ı�ѩ�ĺ������^�ࡣ�ڱ������ݔ늾�·��ȫ�����\�е��^����߀���ܴ���ʹ�Ì��T�ij����b�ã�����ʹ���˹������ķ�ʽ�ڱ�ѩ�h���³������@�ӵķ�ʽЧ�ʵ��£�ͬ�r��������˵�������ȫ���������{�������͵�ݔ늾�·�����C�������ڟo�˿��Ƶ���r�������M�^�������ܵر��_ǰ�����ϵK�^���@Щ�ϵK������^���ӡ������N�ȸ��N������������ǰ�M���^����ɳ������I����Щ�꣬�҇��ڳ����C���˵��о��I��չ�_�˴������о��������о����c��УͶ���˾�ľ����M�г����C���˵����ƣ�Ҳ���F�˺ܶ�������о��ɹ�[1 - 3]��
����1 �o�E���ӞV������Ϣ�ں��㷨��B
��������ʹ���˟o�E���ӞV������Ϣ�ںϼ��g�������C����[4 - 6]�M�Ѓ������@�N��Ϣ�ںϼ��g���ԏĸ������@�_ϵ�y���Ի��Ć��}�����O�����C���˵���Ϣ�ںϕr�漰�ĸɔ_��
������Ϣ�ڲ���IJɼ��^���У����^�o�E���Ӹ��V�������a��������Ϣ��������ͨ�^������Ϣ��늙C�c�������M���ӣ�������ǰ�\����ɳ���������
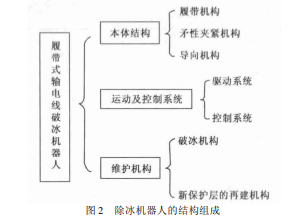
����2 �����C���˿��w�OӋ
����2. 1 �C���˵ęCе�Y���OӋ
�����Ƅӳ����C���˵Ŀ��w�OӋ�������w�Y�����\�ӿ���ϵ�y��ȥ���C���� 3 �����֡����w�C���dz����C���˵����w�Y�����֣������C����ǰ�M���Ď��Y�����cݔ늾������ԊA�o�C�������еČ���C���������ڳ����C���˵����M��ʹ�������zʽ���Ď��Y�������C���M���cݔ늾����^��Ľ��|��e�cĦ�������Ե����z���Ա��Cݔ늾��ı��治���ܵ��p�ģ��A�o�C��ʹ�Ď��C���ˌ�ݔ늾���ֱ���кܺõ��m���ԡ�����ϵ�y���Ԍ��F�dz����C���˵�ǰ�M�c��ͣ�l��ָ����Fݔ늾����Ʊ������Ќ���C���܉F�Ʊ����ܣ�߀���Ԍ��F�����|�ľS�o�����w�ęC���˵Ĺ��܄��֞�:
����2. 2 �C�����Ď���λ��Ӳ�������OӋ
���������C���������M���Ʊ����������ٶ�Ҫ���{�����е��ٶ�Ҫ���������ĺ���M���{���������ЙC���˵ı��w�OӋ�r�����ܳ���Ҫ������: �����ٶ� v < 5m/min ����������¶� θ > 60o ���Ʊ����D�� t = 300 r/min ���C�������� m < 25 kg�������OӋ�����M�C������ʹ��ݔ늾����^���ȵ��Ď����OӋ�������w�ĽY����ݔ늾�·�@�ȵ�׃�������m������D 3 ��ʾ�������wʹ�Ï��ԙC���M���B�ӣ��Ď��Y������֧�ܡ����µ��Ď����Ď�����늙C���O�䣬ͨ�^�װ�ʹ�ÊA�o�C���A�o�����µ�ݔ늾��ϣ�����C���O�õĵװ��ǰ���c�����ĵij����C���˰�����һ�Ď��Y���c�ڶ��Ď��Y���ɂ����֣����w�������z�Ď�����݆�c�����S�D�ӣ������S�c��݆�̶��B�ӣ��Ď������¹������ɂ����o݆���Ա��C�Ď��cݔ늾�֮�g���Ӿo�ۣ������˙C���˵��������������C�����C�������Ď��а�ȫ���������������ԊA�o�C����ݔ늾��ęC���˵����g��λ���^�����ȵĵ�һ���ڶ��Ď��A�o��ݔ늾������F���У��@�N�Y������������m����ֱͬ����ݔ늾������C��ݔ늾������з���:
����2. 3 ����ģ�K�OӋ
���������ݔ늾�·������������������ӣ����˷�ֹ�U���������࣬�����C���˵��OӋ��ԓ�M�����C�p�㣬���ڔy���������C����߀��횾��к������ܱ��������������C���˵Ĺ����h����·��������·��һЩ���B���������N���^���Ӵ����Ҵ���λ�Ƅ�·�����ϵK������C���˵Ĺ����h�����Կ��Y�鏊늴ň�����Y��������늴ň���ָ�C�����\�еĭh����·��̎��һ�N����\�еľ�·�У���Y�����ĭh����ָݔ늾�·��ȫ�ֺ��^�Y��ģ�������ȿ���Ӌ��õ��ģ����Ǿֲ����ϵK��ֲ��c�����δ֪�ģ��@Щ�ֲ��h�������ϵK���λ�á��C���˵Į�ǰλ�õȡ�
����3 �����C���˵��ⲿ������Ϣ�IJɼ�
�������������g�IJ���lչ�c����ʹ�ó����C�����ڔ�����Դ�и�����x��Ҳ�M���˸�������Ҫ�����ܳ����C���˿���ʹ�ø��������c�߶ȼ��ɵĂ������M�и��龫�_�ض�λ�c���ƣ��x�����M�Ă��������܇��ĭh�������M�вɼ��r�C���˱��ϵ���Ҫ�������C����Ҫ����������и��߾��ȡ��؏��Ժá������Ըߵ����c����һЩ���ӵĭh��Ҫ�������õ��m�����������������`���ȡ����Է���������Ҫ���m�ȣ�����^�ߵĜʴ_���c�`���ȕ�Ӱ�ϵ�y�Ĺ������ȣ�����������ܱ��C���_��Ҳ���܌��F�ʴ_���ϵ�Ҫ���^���ϵķ����������xȡ�˼�����������t��������������������ȷǽ��|ʽ�Ă����������ϵK��ęz�yϵ�y���ǽ��|ʽ�Ă�������ͨ�^��ň����Ⲩ���t�⾀�����g���f���|�M�Йz�y��
����4 �ɔ_��Ϣ�ĔM���ų��^��
����������һ���ֵă��ݣ�ϵ�yͨ�^�o�E���ӞV������Ϣ�ں��㷨���C���˵����M���ƺɔ_�������ӿ�����ͬ�r�������Ʊ��C�����ߵ���늙C�������C���˸����������ɼ������������ɼ����^��Ϣ�M�Ϯa������Դ�������@Щ���������˕r�C���˱��w���x�ϵK��ĸ��N��Ϣ����ϼ��⡢�t�⡢������������Ϣ�����������C���˵ĸɔ_�������̈D��D 5 ��ʾ��
�������P֪�R���]���C���ˌ��IՓ��Ͷ��SCI�ڿ��ðl��
�����ڳ����C���˵�������Ҫ��Խ�����N���^���ӡ��͏����A��֧�θ������@Щ�O��ͳɞ�����C������·�����ߵ��ϵK�^��������@Щ�ϵK����F�L���x���ܱ��ϵ����߱���܉���ڱ������b�ĸ��N�������Ĕ������R�e�ϵK�����Ϣ����ɱ��ϲ��Ե��ƶ��c���τ��������Č��t�⡢���⼰���ȷǽ��|�Ԃ������ɼ��܇��ĭh�����������^�������������ںϺ��M�б���Ӌ�㣬�����������b�ڳ����C���˵�ǰ������ 4 �棬��Ϣ�ںϳɞ�����C�������ǰ�е���Ҫ���A��
����5 ϵ�y������
�������˸��õ���C���ĵ���Ϣ�ںϷ����ڳ����ƄәC�����еă�Խ�ԣ�����У����Ϻ�ij����Ӌ�㹫˾�ęC���ˮaƷ����������Ʊ����ܷ���ƽ�_���yԇ�����ܰ������Ϝʴ_�ʣ��Ʊ��ٶȵ��P�Iָ�ˣ������������C���ˡ�YJV22 - 3* 300 ��|���䏝��ֱ���� 2. 5 m��ʹ��ʯ��ģ�M�ĸ���������ȣ�������Ђ������ɼ��Ĕ������^�����A̎����ʹ�� Matlab 7. 0 �����M�Мʴ_�ʷ��档����зքe����|�O�Þ鲻ͬ�Ļ���Ӌ���������ٶ��c�Ʊ��ٶȣ��քe��һЩ�������ڲ�ͬ�A���P�]��Ӌ���䔵���ںϵĜʴ_�ȣ�ʹ�ßo�E���ӞV������Ϣ�ں��c�˜ʵ�������Ϣ�ںϵľ����`��ȈD��D 6 ��ʾ��
�����D 6 �б�ʾ�Ę˜����ӞV�����V���r�ľ����`������V�����а��� �� �� �V �� �� 1���� �� �V �� �� 2 �c�˜ʼә��ںϞV������
�����ɈD 7 ��Ҋ�����^�o�E���ӞV���㷨���º����Ϣ�ں�ϵ�y����Ϣ�Ĝy���������^�˜ʵ����ӞV���㷨����ʴ_��ᘌ���ͬ��Ŀ�Ă�����ʧЧ��ϵ�y���`���ϱ��F���^�鷀����׃���������`����� 0. 02 �������C��ԓ�������к��Č����ԡ�
����6 �Y���Z
��������ᘌ������C�����еĂ���������ʧЧ��o���ṩ���r�ʴ_�Ĕ�����r���OӋ����o�E���ӞV������Ϣ�ں�˼�뵽�����C���˵��OӋ�У���һ���x���˼t�⡢���⼰�� 3 �N�ǽ��|ʽ���������b�ڳ����C���˵��܇����������������c�OӋ���m�ϲ�ֱͬ���c���ȵij����C���ˣ���Q�˙C���˔�����Դ��һ�Ć��}; �ڶ������ßo�E���ӞV�����g����Ϣ�M���ںϣ���Q���ڷǾ��ԭh����ij��������Ϣ���Ǻ�����Ϣ�ɔ_���ڲ�ͬ������ʧЧ����r���C���˵ij��������M���˜yԇ���@�N�����C���˵ı��Ϝʴ_�ʸ��_ 96. 3% ���ڂ������p�ĺ�ģ�ͻ֏͵��ӕr�����^ 3 s�����к��Č����ԡ�——Փ�����ߣ��Y�խ��������
���������īI:
����[1]�O��ɏ������⣬������. һ�N���M�ij��߉�ݔ늾�·Ѳ�z�C����Խ�Ϸ��� [J]. �C���� RoBOT. 2006��28 ( 4) : 379 - 35.
����[2]���F�P�����Q�A. ���ږŸ���g���ƄәC���˿���·��Ҏ������[J]. Ӌ��C�y���c���ƣ�2012��20 ( 1) : 164-167.
����[3]�ǹ�ƽ��Ф�ԕ�������������. �ܿո߉�ݔ늾��Ԅ����ЙC���˵����� [J]. �Ї��Cе���̣�2006��17 ( 3) : 237 - 240.
����[4]�� ᪣��x ֲ���O���x. Ѳ���C���˵İlչ�c���� [J]. �C���˼��g�c���ã�2007��3: 37��42.
����[5]���L�࣬�ǐۇ������O��. �߉��ܿ�ݔ늾�·�Ԅ�Ѳ���C���˵����� [J]. ���ϵ�y�Ԅӻ���2004��28 ( 23) : 59 - 91.
����[6]��Sٝ������ᷣ��O����. ݔ늾�·Ѳ�z�C���˵��OӋ�c����ϵ�y�о� [J]. ����I�Ԅӻ���2008��30 ( 11) : 79 - 82.
SCISSCIAHCI