�l(f��)���r�g��2022-01-20���ٷ���Ƽ�Փ���g�[��1��
ժ Ҫ�� ժҪ�����ڸɾ��G���f(xi��)�{(di��o)���Ʒ�����ʩ·�ε������c��ͨ���Բ���ڌ��H��ͨ�����в�ͬ�ɾ��f(xi��)�{(di��o)����Ч���y���������^����������܇�v܉�E��(sh��)��(j��)���ľG���f(xi��)�{(di��o)���Գ��l(f��)�������һ�N����܉�E��(sh��)��(j��)�ij��иɾ��G���f(xi��)�{(di��o)����Ч���u�r�������Ԍ��F(xi��n)����ͬ�G�����Ʒ������u�r��������
����ժҪ�����ڸɾ��G���f(xi��)�{(di��o)���Ʒ�����ʩ·�ε������c��ͨ���Բ���ڌ��H��ͨ�����в�ͬ�ɾ��f(xi��)�{(di��o)����Ч���y���������^����������܇�v܉�E��(sh��)��(j��)���ľG���f(xi��)�{(di��o)���Գ��l(f��)�������һ�N����܉�E��(sh��)��(j��)�ij��иɾ��G���f(xi��)�{(di��o)����Ч���u�r�������Ԍ��F(xi��n)����ͬ�G�����Ʒ������u�r����������܉�E��(sh��)��(j��)�M(j��n)�з����u�r�����܇�v OD ��ꇔ�(sh��)��(j��)�y(t��ng)Ӌ;����ڿ��]�f(xi��)�{(di��o)�ɾ�·��(n��i)δ�f(xi��)�{(di��o)܇�v��(sh��)���ɾ��G���f(xi��)�{(di��o)Ӱ��£�����܇�v���H�c�����B�m(x��)ͨ�^����ڔ�(sh��)��(g��u)���ɾ��G���f(xi��)�{(di��o)�����u�r������������ VISSIM �M(j��n)���˷�����C�����挍�Y(ji��)��������ԓ�u�r�����܉�?q��)���ͬ�ɾ��G���f(xi��)�{(di��o)���Ʒ����M(j��n)�М�(zh��n)�_�u�r�������^��܉�E�y(t��ng)Ӌ܇�v�B�����Ծ߂�����ԣ��������ھG���f(xi��)�{(di��o)�����㷨�ă�(y��u)���c���H��(y��ng)�á�
�����P(gu��n)�I�~����ͨ����;�G���u�r;܉�E��(sh��)��(j��);�f(xi��)�{(di��o)ָ��(sh��)
����0 �� ��
�������иɾ��G���f(xi��)�{(di��o)��������һ�N������н�ͨ���µĸɾ��f(xi��)�{(di��o)���Ʒ����������䲿�κ�Ч�����@�����V�����ڳ��н�ͨ�����С����иɾ��G���f(xi��)�{(di��o)�������P(gu��n)�о��༯���ڿ���ģ�͵ă�(y��u)���������ֵ�[1]�����˾G���١������Լ���λ���ָ��(bi��o)�������һ�N�p��G����̖�ĸ��M(j��n)�D�ⷨ; �S�ۭ���[2]ͨ�^����������g���c܇�v�����ɢ�r�g�������һ�N�ɾ��G���f(xi��)�{(di��o)���������c��λ��ă�(y��u)������; �ڵ��µ�[3]���ھ���Ҏ(gu��)��ģ�ͣ������һ�N�ɾ��f(xi��)�{(di��o)���ƃ�(y��u)�����������F(xi��n)�ˌ�MULTIBANDģ���оG������ʽ��(y��u)��; �G����[4]��܇ꠌ��H��ʽ�ٶȲ����Գ��l(f��)�����p��G������֮������Լ��ٶȲ��Ӱٷְ�֮������һ������Ŀ��(bi��o)�������һ�N�G���f(xi��)�{(di��o)����Ŀ��(bi��o)Ҏ(gu��)��ģ��; �R�P��[5]ᘌ���ͬ�G���K�c�;G�����O(sh��)Ӌ�������p��G���O(sh��)Ӌ��(sh��)���㷨����(g��u)����һ�N�p��G���f(xi��)�{(di��o)��(sh��)�ⷨ; ��������[6]ᘌ��G�������_�h(hu��n)���Ɔ��}�������G�������郞(y��u)��Ŀ��(bi��o)�������һ�N��(sh��)��(j��)�(q��)�ӽ�ͨ푑�(y��ng)�G���f(xi��)�{(di��o)����ģ��; Ma��[7]�����m��(y��ng)�C������G�����ƣ��ԾG�������������`��С��Ŀ��(bi��o)�������һ�N�������m��(y��ng)�˹��~Ⱥ�㷨�ľG������ϵ�y(t��ng)��(y��u)�������������㷨�о����c��(c��)�����㷨��(y��u)������ͬ�㷨ģ�����w�Ƶ����H�ɾ��f(xi��)�{(di��o)·�Εr�㷨�m��(y��ng)�Կ��ܴ���һ�������ˣ�����ͬ�ɾ��G���f(xi��)�{(di��o)����Ч���u�r�о������������㷨�������ԣ������ɾ��G�����Ʒ������H��(y��ng)��Ч����
����Ŀǰ�����ھG���f(xi��)�{(di��o)����Ч�����u�r���ص�[8]�ľG��ϵ�y(t��ng)Ч���c��ȫָ��(bi��o)���l(f��)�����һ�N�G���f(xi��)�{(di��o)����ϵ�y(t��ng)��ɫ�P(gu��n)(li��n)�u�r����;ʩ���c��[9]���÷���ܛ�����p��G������Ч���M(j��n)�����u�r;�����n��[10]���G����ͨ���Ѕ���(sh��)�c���y(t��ng)ָ��(bi��o)��Y(ji��)�ϣ�ͬ�r���]�θɵ�ͨ��Ч�ʣ����û�ɫ�P(gu��n)(li��n)���������G���f(xi��)�{(di��o)ϵ�y(t��ng)����Ч���M(j��n)�����u�r;�R�P[11]ͨ�^Ӌ������ٶȺ;G������֮�g���P(gu��n)ϵ�����ü�������������ͬ�G�����Ʒ����M(j��n)���u�r�������u�r�Y(ji��)���ܵ��ֵ�xȡ�;G���f(xi��)�{(di��o)����ڔ�(sh��)��������;���w�����m���ڲ�ͬ�G���f(xi��)�{(di��o)���Ʒ����u�r�����о��^��ȱ�������⣬��(d��ng)ǰ�G���f(xi��)�{(di��o)����Ч���u�rָ��(bi��o)�@ȡ�^���(f��)�s��ָ��(bi��o)Ӌ���^�������P(gu��n)����(sh��)ȡֵ���ܕ�Ӱ푌��H�������u�r�Y(ji��)���Ĝ�(zh��n)�_�ԡ�
�����C�ϣ�����(n��i)��W(xu��)�ߌ��G���f(xi��)�{(di��o)�����M(j��n)����һϵ���о��������H�������m���ڶ�N�G���f(xi��)�{(di��o)���Ʒ����u�r�����о������^�١�������܇�v܉�E��(sh��)��(j��)����A(ch��)�y(t��ng)Ӌ��܇�v���OD��ꇱ����f(xi��)ͬ���]܇�v�B�m(x��)ͨ�^����ڔ�(sh��)�cͣ܇�Δ�(sh��)��(g��u)���˸ɾ��G���f(xi��)�{(di��o)�����u�r�������ڱ��C�u�r��������ɲ����Ļ��A(ch��)�ό��F(xi��n)�ˌ���ͬ�G�����Ʒ������u�r��
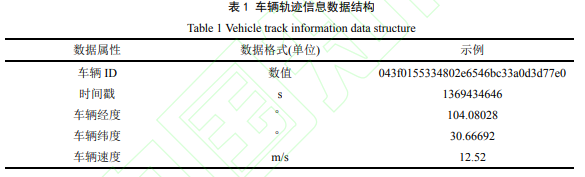
����1 �G�������u�r����
��������������ľG������Ч���u�r�����ǻ���܇�v���H���܉�E��ͨ�^܉�E��(sh��)��(j��)�@ȡ܇�v��� OD ��ꇱ����ڴ˻��A(ch��)�ϣ����þG���f(xi��)�{(di��o)����(܇�v�B�m(x��)ͨ�^�����)��(g��u)�����u�r�������Ķ����F(xi��n)�˲�ͬ�G������Ч���u�r��
����1.1 ��(sh��)��(j��)̎��
������(d��ng)�����ڸ��N�z�y���Լ��K���O(sh��)��đ�(y��ng)�ã�ʹ��܇�v��(sh��)��(j��)�ī@ȡ׃�ø����p�ɣ��S���Ĕ�(sh��)��(j��)ʹ�Ì��ڽ�ͨ���Ƶ��о����Ը������룬�������ڙz�y���p���Լ���(sh��)��(j��)��ݔ�^���еĔ�(sh��)��(j��)�Gʧ��ԭʼ��(sh��)��(j��)������Ҫ����(sh��)��(j��)�M(j��n)���A(y��)̎���Ա�@����Ч��(sh��)��(j��)������܇�v܉�Eԭʼ��(sh��)��(j��)��Ϣ��Ҫ������܇�v ID���r�g����܇�v��(j��ng)���ȡ�܇�v�ٶȡ�܇�v܉�E��Ϣ��(sh��)��(j��)�Y(ji��)��(g��u)��� 1 ��ʾ��
���������Ч��(sh��)��(j��)�@ȡ�r�g���D(zhu��n)�Q���(bi��o)��(zh��n)�r�g�Ķ����ڔ�(sh��)��(j��)̎���c�y(t��ng)Ӌ��߀��Ҫ����(sh��)��(j��)�д��ڵ��؏�(f��)��(sh��)��(j��)�Լ�ȱʧ��(sh��)��(j��)�M(j��n)��̎������܇�v ID ����z�����A(ch��)����Ŀ��(bi��o)�r�g��(n��i)��܇�v�؏�(f��)��Ϣ�M(j��n)������������ȱʧ��(sh��)��(j��)ͨ�^ͬһ܇�v ID �Ĕ�(sh��)��(j��)�M(j��n)���P(gu��n)�I��(sh��)��(j��)���aȫ�Լ��o�P(gu��n)��(sh��)��(j��)���������ɔ�(sh��)��(j��)̎�������ͨ�^����܇�v܉�E��Ϣ�c���H�؈D��Ϣ��ƥ�䲢��܇�v ID �������Ԫ����܇�v܉�E�r�ՈD(�D 2)������܇�v��܉�E��(sh��)��(j��)�M(j��n)��܇�v OD ��(sh��)��(j��)�y(t��ng)Ӌ��
����1.2 ܇�v OD ���
����OD �����������ͨ�W(w��ng)�j(lu��)�����г������c�����нK�c֮�g��һ���r�g������(n��i)��ͨ�����ı���ӳ��ij�����л�^(q��)��Ļ�����ͨ����[12]��OD ����ڽ�ͨҎ(gu��)���о���ռ�ИO����Ҫ�ĵ�λ���ܽ�ʾ�����н�ͨ�Y�Y(ji��)��ԭ��ͨ�����c�������á���(j��ng)����ӵ�Ҏ(gu��)��[13]�������Ќ��ɾ��G���f(xi��)�{(di��o)·�ξ�̖���� OD ����е����c�c�K�c��
�������ԭʼ��(sh��)��(j��)̎�������y�G���f(xi��)�{(di��o)����·��λ����Ϣ�c܇�v܉�E��(sh��)��(j��)�M(j��n)��ƥ�䣬�@��ÿ�v܇�����܉�E�Լ��ٶȣ��Ա㌦�G���f(xi��)�{(di��o)·��(n��i)܇�v�M(j��n)��܉�E�y(t��ng)Ӌ܇�v OD ��(sh��)��(j��)������܇�v OD ���е����c O (origin)�c�K�c D(destination)��λ��܇�v����·��λ�á����x�ھG���f(xi��)�{(di��o)����·��(n��i)�B�m(x��)ͨ�^�ɂ������Ͻ���ڵ�܇�v����Ч�G���f(xi��)�{(di��o)܇�v�����x�G���f(xi��)�{(di��o)·��(n��i)܇�v OD �����г��l(f��)�c��܇�v��ʼ�M(j��n)��G���f(xi��)�{(di��o)�����ǰ·�ξ�̖��Ŀ�ĵ؞�܇�v��x�ɾ��G��·�ξ�̖���������`���ڸɾ��G����(n��i)�_ʼ���·�ξ�̖�����ڸɾ��G���f(xi��)�{(di��o)������܇�vһ�γ��п��ܴ��ڶ��� OD ���С����ڱ���������u�r���������p��G���c����G��Ӌ�㷽����ͬ���F(xi��n)�Æ���G����ͨ�M(j��n)�����C�f�����G����ͨ�ɾ�ʾ��D��D 3 ��ʾ������ i C ��ʾ�ɾ��G���е� i ������ڣ� i L ��ʾ�ɾ��G���е� i ��·�Ρ�
��������(j��)܇�v܉�E��(sh��)��(j��)�y(t��ng)Ӌ�ɾ��G��܇�vͨ����r����ӛ���܇�v OD ���б���Ԕ��(x��)���E���£� Step 1���z�y�M(j��n)��ɾ��G���f(xi��)�{(di��o)����·��(n��i)܇�v��ʼ�r�g 0 t λ��·��λ����Ϣ���c O ;
����1.3 �G���u�rָ��(sh��)�O(sh��)Ӌ
������ͨ�u�r���齻ͨ���ƵĻ��A(ch��)�����ָ��(bi��o)�xȡ����(qu��n)�ش_���ٵ�Ŀ��(bi��o)����(sh��)�_�����������u�����̣����иɾ��G���f(xi��)�{(di��o)��������һ�N����Ľ�ͨ���Ʒ������ڌ��Ȳ�ͬ���Ʒ���Ч���u�r�r�����]�ɾ��G���f(xi��)�{(di��o)���ƃ�(n��i)��ͨ��B(t��i)���܇�v����ٶ��c�O(sh��)Ӌ܇�ٮa(ch��n)��ƫ�x�����ڸɾ��G���f(xi��)�{(di��o)����Ч�����u�r����ʹ�ó�Ҏ(gu��)�Ľ�ͨ�u�r������һ��Ľ�ͨ�u�r�����nj��ڽ�ͨ��B(t��i)���u�r�����u�r�Y(ji��)���ĺÉ��c��ͨ��B(t��i)����ֱ�ӵ��P(gu��n)ϵ�������ھG���ɾ��f(xi��)�{(di��o)���f���䱾�|(zh��)�ϑ�(y��ng)���ɾ��f(xi��)�{(di��o)ǰ���B(t��i)�����̶������u������(j��)��������M(j��n)���u�r���H���H�y�Բ��������Ҳ����M(j��n)�в�ͬ�ɾ��G���f(xi��)�{(di��o)���Ʒ������u�r���C�ϣ����ďĸɾ��G���f(xi��)�{(di��o)���ƌ��HЧ�����l(f��)����(g��u)���ɾ��G���f(xi��)�{(di��o)����Ч���u�r������
�����ɾ��G���f(xi��)�{(di��o)�O(sh��)ӋĿ����ʹ܇�v���O(sh��)Ӌ܇�������ÿ��·�ڶ������G�����Ķ����C�ɾ��G���܉���d���ཻͨ�������ڸɾ��f(xi��)�{(di��o)܇�v���ԣ�܇�v�B�m(x��)ͨ�^����ڔ�(sh��)Ŀ���O��Ӱ��{�T���ڸɾ��G������Ч�����w���ܣ����|(zh��)��܇�v�B�m(x��)ͨ�^�����܇�v��(sh��)ĿԽ��ȃr��܇�v�ڸɾ��G����(n��i)���r�gԽ�̣���܇�vһ�γ��п��ܴ��ڲ�ͬ�B�m(x��)ͨ�^����ڔ�(sh��)�M�ϣ����B�m(x��)ͨ�^���濂��(sh��)����һ�£��H�Ԍ��H܇�v�B�m(x��)ͨ�^����ڔ�(sh��)Ŀ�M(j��n)���u�r��Ӱ��u�r�Y(ji��)���Ĝ�(zh��n)�_�ԡ����˿˷���ͨ��B(t��i)�S�C�Ԍ��u�r�Y(ji��)����ɵIJ��ӣ��ڌ��H܇�v�B�m(x��)ͨ�^����ڔ�(sh��)Ŀ������������܇�v�B�m(x��)ͨ�^����ڔ�(sh��)��܇�vһ�γ��Юa(ch��n)���IJ�ͬ OD ���У��քe����(j��)������܇�v�B�m(x��)ͨ�^����ڔ�(sh��)Ӌ�㌍�H�G���f(xi��)�{(di��o)���������B(t��i)�Ľ��Ƴ̶ȣ����⣬���ڌ��H�G���f(xi��)�{(di��o)�\����δ�M(j��n)��G���ɾ��f(xi��)�{(di��o)܇�v��(sh��)�����ڲ����ԣ��䔵(sh��)��(j��)��С���ɔ_�G���f(xi��)�{(di��o)���H�\�Р�r�����ڸɾ��G���u�r�r�茦���M(j��n)�������C�ϣ���Փ���O(sh��)Ӌ�˾G�����Hͨ��Ч��ֵ���G������ͨ��Ч��ֵ���G��ͨ�Д_��ֵ���M(j��n)���C��Ӌ��G���f(xi��)�{(di��o)�u�rָ��(sh��)����K�����иɾ��G���f(xi��)�{(di��o)�����M(j��n)���u�r���u�r���̈D��D 5 ��ʾ��
��������܇�v OD ��ꇽy(t��ng)Ӌ��(sh��)��(j��)��Ӌ�����P(gu��n)ָ��(bi��o)���£�
����1)�G�����Hͨ��Ч��ֵ�O(sh��)Ӌ�������M(j��n)��ɾ��G���f(xi��)�{(di��o)܇�vӋ��G�����Hͨ��Ч��ֵ R I ����ָ��(bi��o)��С��ʾ܇�v�ھG���f(xi��)�{(di��o)���Ʒ������H�\�Р�B(t��i)�����������x��IJ�ͬ·���M(j��n)��G���f(xi��)�{(di��o)����·�ε�܇�v��(sh��)�c������(y��ng)���H�B�m(x��)ͨ�^����ڔ�(sh��)�˷e�����چ�܇���� R I �����ɾ��G���ڌ��H��B(t��i)�µ�܇�v���^��֣����ֵ���܇���H�B�m(x��)ͨ�^����ڔ�(sh��)��
����2)�G������ͨ��Ч��ֵ�O(sh��)Ӌ�������M(j��n)��G���f(xi��)�{(di��o)܇�v��������r��܇�v���M(j��n)��G���f(xi��)�{(di��o)·���������ׂ��G��������_ʼһֱ����x�ɾ��G��·��(n��i)����(j��ng)�^�ĸ���·�ھ���G�����Y(ji��)��܇�v OD ��ꇔ�(sh��)��(j��)�c�����B�m(x��)ͨ�^����ڔ�(sh��)Ӌ��G������ͨ��Ч��ֵ I I �����ʾ�G������Ч���������\�Р�B(t��i)�����H���x������ OD �����и�������?c��)�܇�v��(sh��)�c���ھG���f(xi��)�{(di��o)�ɾ���(n��i)���r���B�m(x��)ͨ�^����ڔ�(sh��)�ij˷e�����چ�܇���� I I �����ɾ��G���������B(t��i)��܇�v���^��֣����ֵ���܇�ھG���f(xi��)�{(di��o)·������(n��i)�����B�m(x��)ͨ�^����ڔ�(sh��)��
����3)�G��ͨ�Д_��ֵ�O(sh��)Ӌ������δ�M(j��n)��ɾ��G���f(xi��)�{(di��o)��܇�v���䔵(sh��)�����ɾ��f(xi��)�{(di��o)����Ч�����Ӱ푣���Ӌ��G������ͨ��Ч��ֵ�r����(sh��)��(j��) i N ֵ��δ�M(j��n)�оG���f(xi��)�{(di��o)܇�v�{��y(t��ng)Ӌ������ͬ�r��(d��ng)���ڴ���܇�vδ�M(j��n)�иɾ��G���f(xi��)�{(di��o)���ƵȘO�ˈ����rҪ���C�u�r�Y(ji��)���ķ�(w��n)���ԣ��ͱ�회�δ�M(j��n)�Ѕf(xi��)�{(di��o)܇�v��������;���⣬��ͬ�G���f(xi��)�{(di��o)�����ڌ��H��(y��ng)���У����ƈ������в����؏�(f��)�ԡ��������������،��u�r�Y(ji��)����Ӱ푣��ʶ��x�˾G��ͨ�Д_��ֵ���䌍�H���x��G���f(xi��)�{(di��o)����·��(n��i)δ�M(j��n)��G����ͨ��܇�v��(sh��)�c�B�m(x��)ͨ�^����ڔ�(sh��)�����چ�܇���� D I ����δ�M(j��n)��G���f(xi��)�{(di��o)܇�v���^��֣����ڌ�����δ�M(j��n)��ɾ��G���f(xi��)�{(di��o)܇�v������ֵ�����x�� 1��
����4)�G���f(xi��)�{(di��o)�u�rָ��(sh��)�O(sh��)Ӌ�����ھG���f(xi��)�{(di��o)�u�r�ǻ��ڌ��Hͨ��Ч��ֵ���ڿ��]�ɾ��G���_��ֵ��Сǰ���£�Ӌ�������^�ھG������ͨ�Р�B(t��i)�Ľ��Ƴ̶ȡ�
����2 ������C
�������īI(xi��n)[14]�иɾ��G���f(xi��)�{(di��o)����ڻ�����(sh��)��(j��)����A(ch��)������ VISSIM ��(g��u)���ɾ��G���f(xi��)�{(di��o)���挍����·�W(w��ng)��D 6 ��ʾ���ɾ��L�Ȟ� 0.94 km�����а��� 4 �� T �ͽ���ڣ�����ڏ������Ϸքe�齻��� 1 ������� 4�����濨�g��քe�� 234��281��166m��������������������� 3 ��ʾ��������m(x��)�r�g�� 1 h��
�����īI(xi��n)[14]��ͨ�^���H�{(di��o)�У��M���� 2 �N�G���ɾ��f(xi��)�{(di��o)���Ʒ�������քe�錢�����ɾ��G���f(xi��)�{(di��o)���֞�����Ӆ^(q��)�µľG���f(xi��)�{(di��o)���Ʒ����c��Ҏ(gu��) 4 ������ڹ����ڵĸɾ��G���f(xi��)�{(di��o)���Ʒ������� 1 �N��̖���Ʒ�����ǰ�ɽ���ڹ������ڞ� 132 s����ɽ���ڹ������ڞ� 162 s; �� 2 �N���Ʒ����й������ھ��� 170 s��Ԕ��(x��)��r��� 4 ��ʾ��
�������� VISSIM �M(j��n)�з��潨ģ��ģ�M���H�ɾ��G���f(xi��)�{(di��o)���\�Р�B(t��i)���ڱ��C��ȫ�Ե�ͬ�r���Է��㌦��ͬ�G���f(xi��)�{(di��o)���Ʒ�����ģ�M��VISSIM ����ܛ�������S�����u�r���ܣ����ԫ@ȡ��Ч�Ľ�ͨ�u�r����(sh��)���������ṩ���S���� COM �ӿ�֧�ֶ����_�l(f��)��
����3 �Y(ji��)������
����VISSIM ����ܛ������ݔ�����P(gu��n)���`��ͣ܇�Δ�(sh��)�Ƚ�ͨ�u�r��(sh��)��(j��)����Y(ji��)������һ�������ԣ���ʹ�����u�r�������Ӿ��п����ԣ����ö�η���@��·�W(w��ng)�ĸɾ��G���f(xi��)�{(di��o)܇�v���`ֵ���鱾��������u�r�����ą����M(j��n)��һ���ԙz�� 5 min ���λ�r�L���ڷ���r�L��(n��i)�քe�y(t��ng)Ӌ�ɂ�������܇�v���`��r���Y(ji��)����D 7 ��ʾ��
�������Կ���, �G�����Ʒ��� 2 �ڴַ���r�g����Ч����(y��u)�ڷ��� 1���ڷ����ʼ�\���A�����ڷ���ܛ��܇�v��δ�M(j��n)�����Ľ���ڣ��ɾ��G����(n��i)܇�vδ�_(d��)���A(y��)�ڽ�ͨ�����˕r߅�罻�����̖���Ʒ������c���w�G���f(xi��)�{(di��o)����Ч�����u�r�����P(gu��n)�I���ã��˕r����ܛ���������挍��ӳ���Ʒ�������r�����w��ȥ�����ڷ���ܛ����ɵķ��攵(sh��)��(j��)ƫ��ɷ�������Ч�����S��·�W(w��ng)��ͨ��B(t��i)�ķ�(w��n)����څ��ƽ��(w��n)��ͬ�r�ɾ��G����܇�v���`��r��һ�Εr�g���L�B(t��i)�ݺ�ʬF(xi��n)��(w��n)����B(t��i)������ 2 �c���� 1 ���܇�v���`������ 18.15%�������Ч���w�F(xi��n)���@��(y��u)Խ�ԡ�
�������⣬ͬ���� 5 min ���λ�M(j��n)��܇�v OD ��ꇱ��Ľy(t��ng)Ӌ��Ӌ��ɷ����ąf(xi��)�{(di��o)ָ��(sh��)���Y(ji��)����D 8 ��ʾ�����Ʒ��� 2 ͬ�Ӄ�(y��u)�ڷ��� 1���� VISSIM �����u�r��(sh��)��(j��)�ó��ĽY(ji��)Փ����һ���ԣ�ֵ��ע����ǣ����^�� VISSIM �����u�r�Y(ji��)���ڳ�ʼ�r�a(ch��n)���˽Y(ji��)��ƫ�����������ľG���f(xi��)�{(di��o)����Ч���u�r�����ڽ�ͨ��B(t��i)׃���±��F(xi��n)����һ���ķ�(w��n)���ԡ�
�������⣬���ڌ��H�ɾ��G����(n��i)܇�v܉�E��(sh��)��(j��)��������ȫ�@ȡ���}������ MATLAB (li��n)�� VISSIM �����_�l(f��)��ͨ�^�ڲ�ͬ܉�E��(sh��)��(j��)�ɼ�܇�v�B�� p �µ��u�r�Y(ji��)���������M����ȥģ�M���H�G���ɾ���(n��i)܇�v��(sh��)��(j��)�������M(j��n)�����u�r�������������M(j��n)����C����ͬ�B���¾G���u���Y(ji��)��������D 9 ��ʾ�����w���ԾG���f(xi��)�{(di��o)��̖���Ʒ��� 2 ��(y��u)�ڷ��� 1����Y(ji��)���c���IJ������`�����u�r�Y(ji��)������һ���ԣ�ͬ�r�S��܉�E��(sh��)��(j��)�ɼ�܇�v�B�ʵĽ��ͣ��G���f(xi��)�{(di��o)��̖���Ʒ��� 2 ���^�ڷ��� 1 �ă�(y��u)Խ�������ͣ���(d��ng)�B�ʽ��͵� 20%�r����̖���Ʒ��� 2 �ă�(y��u)Խ���y�Ա���Ч�̮�������ԭ�����ڮ�(d��ng)�B�ʽ��ͮ�(d��ng)һ���̶ȕr���ɾ��G����(n��i)�S�C�Ա��Ŵ��ھG���f(xi��)�{(di��o)�u�rָ��(sh��) E I ����(w��n)���w�Y(ji��)�ڌ��H�G��ͨ��Ч��ֵ R I �� R I �ڵ͝B�ʕr���a(ch��n)���^��IJ����ԣ���Ӱ�����u�r�Y(ji��)���������w�������ڱ��C܉�E��(sh��)��(j��)�ɼ�܇�vһ���B���£�ԓ�u�r�����߂䌍�H�����ԡ�
����4 �Y(ji��) Փ
�������������һ�N����܉�E��(sh��)��(j��)�ĸɾ��G���f(xi��)�{(di��o)����Ч���u�r�������ľG���f(xi��)�{(di��o)���H�\�Р�r���l(f��)���挦��ͬ�G���f(xi��)�{(di��o)����܇�v�ٶȲ��_������ɵ��u�r���y������ͨ�^���x܇�v OD ��ꇁ�ӛ䛸ɾ��G���f(xi��)�{(di��o)܇�v�\�Р�r��ͬ�r�Y(ji��)�ϾG����ͨ���������B�m(x��)ͨ�^����ڔ�(sh��)��܇�v�M(j��n)�д�֣����Դ˞���A(ch��)Ӌ��ɾ��G�����H�\�Р�B(t��i)���^�������B(t��i)�Ľ��Ƴ̶ȣ����F(xi��n)�˲�ͬ�ɾ��G���f(xi��)�{(di��o)����Ч���u�r������Y(ji��)��������������������u�r�������Ԍ��F(xi��n)����ͬ�G�����Ʒ�������Ч�u�r;����һ���B�����u�r����Ҳ�߂�����ԡ����ǣ����ڱ��ķ���ģ�����ƣ����ڸ��ཻͨ��B(t��i)�¸ɾ��G���f(xi��)�{(di��o)����Ч���u�r���Լ��ڲ�ͬ�G���f(xi��)�{(di��o)����ڔ�(sh��)�c���������µľG������Ч���u�r�д��M(j��n)һ���о���——Փ�����ߣ���С�� 1��κ���_(d��)1����·�� 1���д��� 1
���������īI(xi��n)
����[1]������, ���䏊, ���i. ���иɾ��p��G�����ƃ�(y��u)���O(sh��)Ӌ[J].�ؑc������W(xu��)�W(xu��)��(��Ȼ�ƌW(xu��)),2014,28(12):108-112.
����[2]�S�ۭ�, �W��ǰ. �ɾ��G���f(xi��)�{(di��o)���ƃ�(y��u)���о�[J]. �V���Ƽ���W(xu��)�W(xu��)��, 2020, 31(3): 91-98.
����[3]�ڵ���, �����, ������, ��. ���M(j��n)�ĸɾ��f(xi��)�{(di��o)��̖���ƃ�(y��u)��ģ��[J]. �㽭��W(xu��)�W(xu��)��(���W(xu��)��), 2017,51(10): 2019-2029.
����[4]�G���, ۳С��, �ǟ�, ��.���]����ٶȲ��ӵ��M(j��n)�چηžG���f(xi��)�{(di��o)����ģ��[J].��ͨ�\ݔϵ�y(t��ng)�����c��Ϣ, 2017, 17(3): 83-90.
����[5]�R�P, �콨�}, ���W˴. �M(j��n)�چΪ����з�ʽ�µĸɵ��p��G���f(xi��)�{(di��o)���Ɣ�(sh��)���㷨[J]. �Ї���·�W(xu��)��,2010,23(3):95-101.
����[6]������, �, �T�h(yu��n)�o. ��(sh��)��(j��)�(q��)�ӽ�ͨ푑�(y��ng)�G���f(xi��)�{(di��o)��̖����[J]. ������Փ�c��(y��ng)��, 2016,33(5): 588-598.
����[7] Ma C X , He R C. Green wave traffic control system optimization based on adaptive genetic-artificial fish swarm algorithm[J]. Neural Computing and Applications, 2019, 31: 2073-2083.
����[8]��, ʩ�Ęs, �X��|. ���иɵ��G���f(xi��)�{(di��o)����ϵ�y(t��ng)��ͨ�u�r����[J]. ���ݴ�W(xu��)�W(xu��)��(��Ȼ�ƌW(xu��)��), 2015, 43(3): 369-376.