�l���r�g��2020-02-20���ٷ���Ƽ�Փ���g�[��1��
ժ Ҫ�� ժҪ:�錦��ժ�C���˵��R�e�c��λ�����M�Ѓ�����������C���˵��\��Ҏ��ԭ���c��ժ�C���˵Ŀ���Ҫ����Y���M�Б���̽ӑ��ͨ�^���ժ�C���ˌ��������R�e��λ��Փģ�ͣ��\�ú��ĈD���R�e�c̎���㷨��Ӳ�����Ä������Ѕf�{��ܛ��ϵ�y���_ָ����ƣ����F���
����ժҪ:�錦��ժ�C���˵��R�e�c��λ�����M�Ѓ�����������C���˵��\��Ҏ��ԭ���c��ժ�C���˵Ŀ���Ҫ����Y���M�Б���̽ӑ��ͨ�^���ժ�C���ˌ��������R�e��λ��Փģ�ͣ��\�ú��ĈD���R�e�c̎���㷨��Ӳ�����Ä������Ѕf�{��ܛ��ϵ�y���_ָ����ƣ����F����Ԃ����b����Ϣ�����ĺ����Բɼ��c��ݔ���_�����r��λĿ�ˡ��M���˲�ժ�C���˵��R�e�c��λԇ�Y������:������C�����\��Ҏ���c���ƙC���£�ͨ�^Ŀ���c��λ�D�����Чץȡ����ժ��λ�r�g�ɿ�����0.6s���ң��C�϶�λ�ʴ_�ʱ�����93.8%���ϣ���߶�λ�ʴ_�ʿ��_95.7%���M���ժ�C�������I������C���OӋ����Ŀ����ԣ��ɞ�����r�I�O�䶨λ�_�l�ṩ˼·��
�����P�I�~:��ժ�C����;�D���R�e;�\��Ҏ��;��λ�ʴ_��
����0����
�����S��Ӌ��C���g���M�����Լ�ҕ�X�D��@ȡ�c�D�Q����Ȱlչ���҇��IJ�ժ�C�߲��������ܻ����o�˻�������׃�����˽⣬�ڴ�Ҏģ�Nֲ�^���ь���ժ�C����Ͷ��ʹ�ã�������˹��ڄӳɱ�������˲�ժ���I�ʡ����ǣ��r�I��ժ���I�h���IJ��_�������]��ժ��B������ķֲ����|���������أ��o���ܲ�ժ�C�������I�������µ��������P���ҌW�߽������������ͬ�̶ȵ��о�Ŭ�����ڏV���lչ�����I��������������һ�����\��Ҏ�ɱ����õ����H������C���˄t��һ�N��Ŀ��ҕ�X�R�e���A�y���ж���Ҏ���������ȶ����һ�w�����ܙC��������ƺ�������Ŀ�˵��R�e�c��λ����ˣ����ď�����C���˵��\��Ҏ���C���Ƕ����֣����،���ժ�C���˵��R�e�c��λĿ�˭h��չ�_�о���
����1��ժ�C���˹���ԭ��
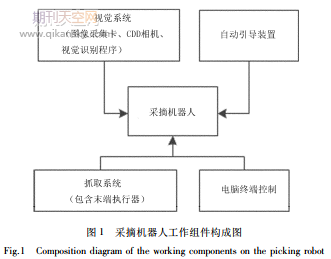
����������ժ�C������һ�Nģ�M�˹��M�Є����ęC��������ԭ���ɸ�Ҫ������:��һ����ָ���£�ͨ�^��ժ�D���R�e�c�D�Q���������f�c���ƣ������Ի���ҕ�X��B�D����������Ĕ��֣����F��ժ���ϼ�̎����s��ժ�h���Ĺ��ܣ��γ�Ҏ�t�����\�Ӳ�ժ܉�E���乤���M����Ҫ�ɸ�D��ɼ��c�D�Q���ܘ��ɵ�ҕ�Xϵ�y���R�e�c�A�y�\��·�����Ԅ������b�á��M�в�ժ������ĩ�ˈ��е�ץȡϵ�y���Լ�������Ϣ�����{�����㷨���ƹ��ܵ���X�K�˽M�ɣ����M���ڸ߶ȅf�{�������ɲ�ժ���I����D1��ʾ��
���������r��ҕ�Xϵ�y����ժ�D���M�ОV�������⻯�c�D��ָ�̎�����f����ժ�C���˵��п�ϵ�y��������̎���D�Q����ժĩ�ˈ�����;�C���˵Ĉ��б۽o���ʴ_�ĽǶȷ����c�P�I�������������C�˲�ժ�\��Ҏ�������������Ƅӡ��D��Ƕȼ��Δ��Č��F�ȡ���ժ�C���˵�D-H�������1��ʾ��
����2�\��Ҏ���c��ժ���܌��F
����2.1��ժ������Փģ�ͽ���
����������ժ����Ŀ�˵Ĝʴ_���F���P�I���ڌ�������ҕ�X�������R�e�c��λ���Y������ĺ����\�ӄ����W�㷨Ҏ���������֮�^��ʴ_����Ϣ��֪̎�����g�����]�����\�ӵ����D�Ƕ��c���λ���Pϵ����ժ�C���۵��\��܉�E���\�ӿ���Ҫ������D2��ʾ�IJ�ժ�C�����\���R�e�c��λ����ϵ��
����3��ժ�R�e�c��λԇ�
����3.1ԇ�l��
�����M������C�����\��Ҏ���µIJ�ժ�C�����R�e�c��λԇ�D7���x����ԇ��زġ�ԇ�l���O��:�ٲ�ժ���I�h���x���o�L��ĸɔ_��B�����C��Ϣ�@ȡƽ����;�ڸ���ժ��������ƽ�����o�Д�;�۲�ժ�C����ܛ������ϵ�y�����\�еȡ�
����3.2ԇ����
����ͨ�^ԇ��^����Ŀ���c��λ�D�����Чץȡ���@�ò�ժ�C���ˌ���ժ��������Ҫ̎���^�̣���D8��ʾ����Ŀ��λ���γɅ^��߅����ֵ�D��ͨ�^�����㷨�M�о��εķֲ��z�y����Kͨ�^ϵ���ж����õ�Ŀ�˲�ժ�c���Ķ��Ӳ�ժ���б��M�Є�����
�����xȡ���������M�в�ժ���P�I���ƕr�g�����^���u�rָ�ˣ��xȡ������ժ��λ�ʴ_������C���u�rָ�ˣ���ԓ��ժ�R�e�c��λԇ���M�нyӋ�������γ�ԇ�������3��ʾ���ɱ�3��֪:������C�����\��Ҏ���c���ƙC���£�ԇ�Δ��xȡ20��50֮�g���ȣ��@ȡ�ò�ժ�D���R�e�r�g������0.435��0.513s֮�g���f���D���R�e���OӋ���Ӳ�����һ����ƽ����;��ժ��λ�r�g������0.6s���ң��Ҳ�ժ�C���˵Ķ�λ�ʴ_�ʱ�����93.8%���ϣ�ԇ���С�
����4�YՓ
����1)������C���˵��\��Ҏ��ԭ���c��ժ�C���˵Ŀ���Ҫ���M���ںϣ�ᘌ���ժ���R�e�c��λϵ�yչ�_�OӋ����˲�ժ�C���ˌ��������R�e��λ��Փģ�ͣ��M��ͨ�^ܛ��ϵ�y���_ָ������cӲ�����Ä������Ѕf�{�γ��������R�e��λϵ�y��
����2)�����\�ÈD���R�e�c̎���㷨�����ö���Ԃ����b�Ì��F��Ϣ�����IJɼ��c��ݔ�����F�ʴ_�����r�ض�λĿ�ˣ����M�в�ժ�C���˵��R�e�c��λԇ
����3)ԇ����:������C�����\��Ҏ���c���ƙC���£�ϵ�y�ĈD���R�e���ܱ��Cһ����ƽ���ԣ���ժ��λ�r�g������0.6s���ң��C�϶�λ�ʴ_�ʱ�����93.8%���ϣ���C��ԓ�OӋ����Ŀ����ԣ��ɞ���������r���O��Ķ�λ�����ṩһ��������
�������PՓ�����]��Androidƽ�_��Ę�R�e�����о�
����ժҪ���о�ֱ��ϵ�y���̌��F��Ę�R�e�����ڽM�����g����Ę�R�e�ͻ�����Ӌ�����Ę�R�e���N�㷨.ֱ��ϵ�y�����㷨�Ɍ��F�����wɫ����Ę�z�y;���ڽM����ʽ����OpenCV��Ɍ��F��Ę�ęz�y���������^;��Ӌ�㷽ʽ�Ɍ��F��Ę�R�e�����Ӌ��ȹ���.�о��ˆT�ɸ����OӋҪ���x���㷨���M���R�eϵ�y������.
SCISSCIAHCI