�l(f��)���r�g��2018-08-06���ٷ���Ƽ�Փ���g�[��1��
ժ Ҫ�� ժҪ:�S�����I(y��)���a(ch��n)�^������Ϣ�����g(sh��)ˮƽ�IJ����������������I(y��)Ч�ʺ��������ˆT���O(sh��)��İ�ȫ����Խ��Խ����ҕ������ᘌ��F(xi��n)����܇ϵ�y(t��ng)�ķ������Y(ji��)���ИI(y��)�l(f��)չ�ͼ��g(sh��)�l(f��)չڅ�ݣ�Ԕ���U���o�˻�������܇����ϵ�y(t��ng)�ĸ������o�˻���܇ϵ�y(t��ng)�Ŀ��w��ܺͻ������ܣ���
����ժҪ:�S�����I(y��)���a(ch��n)�^������Ϣ�����g(sh��)ˮƽ�IJ����������������I(y��)Ч�ʺ��������ˆT���O(sh��)��İ�ȫ����Խ��Խ����ҕ������ᘌ��F(xi��n)����܇ϵ�y(t��ng)�ķ������Y(ji��)���ИI(y��)�l(f��)չ�ͼ��g(sh��)�l(f��)չڅ�ݣ�Ԕ���U���o�˻�������܇����ϵ�y(t��ng)�ĸ������o�˻���܇ϵ�y(t��ng)�Ŀ��w��ܺͻ������ܣ����F(xi��n)��^(q��)�������Ԅӻ���
�����P(gu��n)�I�~:�o�˻�����,���[����,��܇����,���ܹ��S,��^(q��)����
������ͨ��܈܇�g����܇�����������˹��������h(hu��n)�����{(di��o)�����˄ڄӏ��ȴ������`�������O(sh��)���\��Ч�ʵͣ���ȫ�Բʮ����Ҏ(gu��)���У������m�r���“�Ї�����2025”����F���I(y��)��Ϣ�����I(y��)��(w��)������ں��ǰl(f��)չ�ı�Ȼ�x�l(f��)չ�o�˻�������܇����ϵ�y(t��ng)���ȿ��������܇�\��Ч�ʡ��������ʡ�������Դ���ģ��ֿɜp�p���˵Ąڄӏ��ȣ�������ȫ�ԣ������ܻ����S�l(f��)չ�ı�Ȼ����֮һ��
����1ϵ�y(t��ng)���w�ܘ�(g��u)
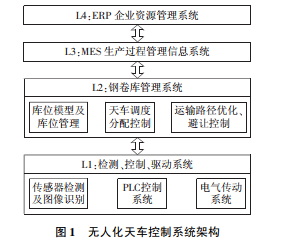
�������ڟo����܇����ϵ�y(t��ng)�Y(ji��)��(g��u)���s�����r��׃�����m��(y��ng)���N���r�µđ�(y��ng)�ü��Uչ����ϵ�y(t��ng)���֞�ERP(��I(y��)�YԴ����ϵ�y(t��ng)-L4)��MES(���a(ch��n)�^�̹�����Ϣϵ�y(t��ng)-L3)��䓾�����ϵ�y(t��ng)-L2���z�y�����ơ��(q��)��ϵ�y(t��ng)-L1����D1��ʾ��
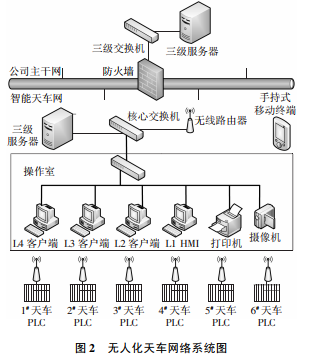
����������܇���\���^������Ҫ���١���(w��n)������Ϣ���Q������(j��)��F�ИI(y��)�Ĺ��r�ͭh(hu��n)�����c�����ù��I(y��)��̫�W(w��ng)�����I(y��)�o����̫�W(w��ng)��DP�W(w��ng)�j(lu��)���ʹ�õ�ģʽ���_��ϵ�y(t��ng)���������͈�(zh��)�ЙC��(g��u)��̖�Č��r�@ȡ�͂��_���Ķ���������W(w��ng)�j(lu��)ϵ�y(t��ng)�Ŀɿ��Ժͷ�(w��n)���ԣ���W(w��ng)�j(lu��)ϵ�y(t��ng)�D��D2��ʾ��
����2��܇PLC����ϵ�y(t��ng)
������܇�o�˻�ϵ�y(t��ng)�܉�?q��)��F(xi��n)�Ԅ�䓾����ҡ��Ԅӵ������ž�����܇�Ԅӟo���{�ȹ��ܡ�Ҫ���F(xi��n)�@Щ���ܱ�회���܇���丽���O(sh��)���M�о��_�Ŀ��ơ���܇��λ���R�e䓾����Ԅӵ�����Ȼ��ͨ�^��܇λ�ÿ��Ƶ��_䓾�Ŀ�ˎ�λ���Ԅӷž������@���B�m(x��)�����I(y��)�^������܇�o��ϵ�y(t��ng)��������I(y��)Ч�ʺͱ��C���I(y��)��ȫ������܇�\�Еr��߀������܇�M��λ�á��v��λ�á���ֱ����λ���M�Ѕf(xi��)�{(di��o)����[1]��
����2.1PLCӲ���M��
����PLC�x�õ����T��S7-300�ͮa(ch��n)Ʒ��������܇�Ļ��A(ch��)�Ԅӻ����ƣ�������܇�е�߉���ơ������ơ�λ�ÿ����Լ�������(li��n)�i���ƣ����ϙz�y������Ƶȡ���S7-300CPU�����ģ��c��λ�O(ji��n)��Ӌ��C�M��ETHERNET�W(w��ng)���c�ֲ�ʽI/Oģ�K�ͽ���׃�l�{(di��o)������(g��u)��ProfibusDP�����W(w��ng)�j(lu��)ϵ�y(t��ng)�����F(xi��n)����늿�ϵ�y(t��ng)�ľW(w��ng)�j(lu��)������ģʽ��PLC���b��늚���늿ع��(n��i)���ֲ�ʽI/Oģ�K���b����܇�{��ҡ�
����2.2��Ҫ�������x�ͼ�����
������܇��܇(X�S)�\�о��x�^�L�����_�װ��ף���λ�Ùz�y����һ�l���صľ��a��|(�ַQ�T��ĸ��)�팍�F(xi��n)��ͬ�r��Q����������c�Ƅ���܇֮�g�ɿ��Ĕ�(sh��)��(j��)ͨ�š���܇����λ�Ùz�y�����ڸБ�(y��ng)�o�����g(sh��)��܇��λ�Ùz�yϵ�y(t��ng)����λ�Ùz�y���ȿ��_5mm���z�y�L�ȿ��_1km���Б�(y��ng)�쾀�c���a��|�Ŀɿ��Б�(y��ng)���x��5��30cm��������܇�\���^������ӵ�Ӱ푡�
������ˣ���܇��܇λ�Ùz�yϵ�y(t��ng)�\�з�(w��n)�����ɿ��ԏ�����܇С܇(Y�S)λ�Ùz�y���ü���y������������λ���ȿ��_2mm�ԃ�(n��i);�ǽ��|�y���L�Ⱥ��ٶȣ����ܴ����ۺͱ��y����|(zh��)��Ӱ푡���܇���^(Z�S)λ�Ùz�y���ý^��ֵ���a��������һ���^����λ���a����ͣ늻��P(gu��n)�C�����_�C���y���r���Կɜʴ_���x��ͣ늻��P(gu��n)�Cλ�õش��a�����ʴ_���ҵ���λ���a���Ķ�����λ�÷��������_���µĿ��Ʈ�����
����2.3��Ҫ���ƹ���
������܇PLC����ϵ�y(t��ng)�܉�?q��)��F(xi��n)���¹���:��܇�M�v��ֱ��λ�ÿ���;�A�Q���[����;�M�v��ֱ����(li��n)�ӿ���;��ȫ�߶ȿ���;�A�Qλ�ÿ���;��ײ����;�^��܇�����M��λ�ÿ����Լ���̖�z�y���(q��)�ӿ��ơ�
����3���ӿ���늿�ϵ�y(t��ng)
������܇�Ĵ�܇���ߡ�С܇���ߡ����^���������^���������ö����ӽ���׃�l����ϵ�y(t��ng)�����������c:(1)�ٶȿ��ơ�λ�ÿ��Ƹ����ʣ��nj��F(xi��n)��܇�o�˻������ܻ��ı�l��;(2)���F(xi��n)���[����Ť���Ƶ��T�����ù���;(3)����늙C���F(xi��n)ƽ��(w��n)���ӣ�������L�O(sh��)��ʹ�É��������L�S�o����;(4)����늙C׃�l�b�ò��ýy(t��ng)һ�������b�ã������b��Ԫ����IGBT���Ɍ��F(xi��n)��ܻ���;(5)��������Ԫ�Ɍ��F(xi��n)��ܻ������Ҍ������^���^һ��O(sh��)�䌍�F(xi��n)��Ч��(ji��)��;(6)�����b�������w�e�^С���ҿɟo�g϶�o�����ã����Ϳ��gռ�á�
����4���[����ϵ�y(t��ng)
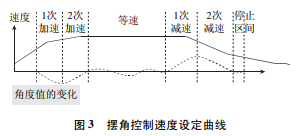
������܇���\�Еr������A�Q�²��[�ӷ����^��Ӱ���܇ȡ���ͷž����������a(ch��n)Ч�ʣ����ؕr����ɊA�Q�c䓾�֮�g�Ŀ��������F(xi��n)䓾��|(zh��)�����}�����Ա�횿�����܇�ڙM���c�v���Ƅӕr�A�Q�²��Ĕ[�ӷ��ȡ�ͨ�^�[�Ǚz�y�x�z�y����܇��С܇�Ƅӕr�Ĕ[�ǣ���܇PLC����(j��)�[�Ǵ�С���[�ӷ���Ӌ����a���ٶȣ�Ȼ��B�ӵ���܇��С܇�Ŀ����ٶ��ϣ��Դ˿�����܇�A�Q�Ĕ[�ӡ���܇PLC�Ѵ�܇��С܇���\���ٶȼ�λ�õȔ�(sh��)��(j��)��Ϣ�l(f��)�͵��[�ǿ��������[�ǿ��������Ք[�Ǚz�y�x�z�y���Ĵ�܇��С܇�[�Ǻ��ٽY(ji��)�ϴ�܇��С܇�ĸ��N��(sh��)��(j��)��Ӌ����[���a���ٶ�(�ٶȿ���������D3��ʾ)��Ȼ��l(f��)�ͽo��܇PLC����܇PLC���a��ֵ�B�ӵ��ٶ��O(sh��)��ֵ�ϣ�ͨ�^DP�W(w��ng)�l(f��)�ͽo�����b�ã����ƴ�С܇���ٶȡ�
����5܇�v�R�eϵ�y(t��ng)܇�v�R�eϵ�y(t��ng)�Ǹ���(j��)ͣ�õ�܇�v�N��Π��ͣ܇λ���R�e܇�v��������ͬ�N�܇�v�������λ���ˣ�ʹ�b����ж�����I(y��)�Ԅ��M�е�܇�v�R�eϵ�y(t��ng)���似�g(sh��)���c����:�y����ʽ:�������ϵ�y(t��ng);�y��λ��:܇�v�ϲ�;�y���`��:±50mm;�y������:��ͬ�Π��܇�v;3D����D���F(xi��n)�����ܜy���Ͼ�λ����;�y�팒�ȡ��⏽���_�J���Π�����_��;��܇��С܇���߶�λ�õĜy����
����6�췿�����Ԅӻ�ϵ�y(t��ng)�췿�����Ԅӻ�ϵ�y(t��ng)����Ҫ�����nj��F(xi��n)��^(q��)䓾���������䓾���g������䓾������������܇���I(y��)�^�̰������I(y��)Ӌ�������I(y��)��(zh��)���Լ����I(y��)�Y(ji��)����������Ҫ�������¡�
������^(q��)����:����(j��)�F(xi��n)����IJ��ã�ͨ�^ϵ�y(t��ng)����(sh��)���O(sh��)�ã���ϵ�y(t��ng)��Ϣ�c���H�Ď�D���B�ӡ���Ĵ�С����ķֲ�����ķֲ��Լ�������λ�õ��������˶����c�F(xi��n)���ɱ����s�ŵġ�ͬ�r�������H�ľ��x����(sh��)�ṩ�o����ϵ�y(t��ng)���Ķ�������ײΣ�U�İl(f��)������^(q��)�O(sh��)�����:�췿�����Ԅӻ�ϵ�y(t��ng)����܇���^��܇�����M����IC���xȡ�O(sh��)���Լ��ֳֽK�˵��O(sh��)��M�ɡ����@Щ�O(sh��)���ṩ����Ϣ�Bͨ���ٿ����O(sh��)����\�D(zhu��n)�������γ��������Ԅӻ�ϵ�y(t��ng)���ǹ����Ԅӻ�ϵ�y(t��ng)���ɻ�ȱ��һ���֡�
�������܇�v��ۙ:���܇�v��ۙϵ�y(t��ng)����Ҫ����؛���r��ͨ�^��Ϣ��������܇�v�b�d��䓾�λ���Լ���(sh��)���M���R�e����܇�{(di��o)�ȹ���:����(j��)�}��Ď�D��Ϣ����܇�Ĺ���ؓ�ɣ��Լ��������I(y��)�ă�(y��u)�ȼ��������ķ�����܇��
����Ҫ���һ���΄�(w��)��Ҫ2�_��������܇��ϕr����܇�{(di��o)��ϵ�y(t��ng)�Ԅ��{(di��o)����܇���������I(y��)Ӌ������:�����cMES�������ܿ�ƽ�_��ϵ�y(t��ng)�ğo�p�B���Լ���(sh��)��(j��)���Ԅӽ��Q���ܡ���������ϵ�y(t��ng)���_�����I(y��)Ӌ�����R�r���I(y��)ָʾ��ϵ�y(t��ng)�Ԅ��M��Ŀ��λ���A�s����܇�Ԅӷ��䡢�Ԅ�����ָ�]���������졢����͵���Ĺ�������D����:����(j��)�F(xi��n)�����I(y��)�Č����������������M�Ќ��r��ۙ�����ϵ�λ�ü��Ͼ��γ��ˎ�D������(j��)���r�Ď�D��Ϣ�M�ЛQ�ߣ����ܸ��ʴ_��������D���[����λԔ�顢��Dͬ���ȹ��ܡ�
����7�ֳ�ʽ�K��ϵ�y(t��ng)��܇�o�˻�ϵ�y(t��ng)���ճ����I(y��)ʹ���ˆT�����������ˆT߀������ܲ����ˆT���O(sh��)��S�o�ˆT���S�����ˆT���@Щ�ˆT�P(gu��n)ע�IJ�����ô������܇��������Ҫ�ƿ؎�^(q��)���������ϸ�ۙ����^(q��)��������܇���r��B(t��i)����܇���I(y��)�y(t��ng)Ӌ�Լ�����(j��)�F(xi��n)����Ҫ������I(y��)Ո���D(zhu��n)�l(f��)�o�������ˆT�������������c���O(sh��)����܇�o�˻�ϵ�y(t��ng)�ƄӽK��APPܛ��(���Q��܇APP)��ᘌ���ͬ��ʹ���߿��Ԍ��F(xi��n)���¹���:��ܲ����ˆT����Ҫ�M�ЬF(xi��n)�����N���I(y��)��������졢���졢�P�졢�b܇��ж܇����������ϡ����ϡ����Y(ji��)�ȬF(xi��n)����������܇�O(sh��)��S�o�ˆT����Ҫ�h�̱O(ji��n)����܇�ϸ����O(sh��)�䡢�������Ġ�B(t��i)���鿴��܇��̡�����܇���w�\����r�M���\�ࡣ��^(q��)�����Ñ���ʹ���ֳֽK�˿ɲ�ԃ��ǰ��^(q��)��؛��r����܇���I(y��)�ʽy(t��ng)Ӌ�����r��ӳ��^(q��)�ķֲ���r�Լ����I(y��)���ȡ�
����8�Y(ji��)���Z
��������ȫ���U���˟o�˻�������܇�Ŀ��w��ܺ���Ҫ�M�ɲ��֣�ᘌ�������ϵ�y(t��ng)����˷����ܘ�(g��u)����ָ�ˣ���Q�˂��y(t��ng)��܇���ڵĶ�λ���Ȳ��ߣ�����Ч�ʵ��µȆ��}���������܇�����I(y��)Ч�ʣ���������܇�O(sh��)������ʣ��O��ؽ����˹��˵Ąڄӏ��ȣ�����Ч������I(y��)������ijɱ������F(xi��n)�ˎ�^(q��)���I(y��)��������Ϣ�������_�����o�˻�������F��܇�I(l��ng)����ИO�����ƏV�rֵ��
���������īI:
����[1]���Թ⣬�����A����СƼ.��܇���ܿ�����[J].��������Ӽ��g(sh��)��1996(3):2.