�l���r�g��2020-09-22���ٷ��Ӌ��C�QՓ���g�[��1��
ժ Ҫ�� ժҪ��������҇��C�χ����IJ������������I��Ѹ�Ͱlչ��ӿ�F�������Ĺ��I��I���S���Ї�����2025�������ԵČ�ʩ�c���I4.0�����M���҇�����܇���Cе��ұ����ӡ������ȶ��ИI�����˹��֒������Iģʽ�����D���ڸ�Ч����ȫ�Ĺ��I�C���˼���ϵ�y���棬����ͨ
����ժҪ��������҇��C�χ����IJ������������I��Ѹ�Ͱlչ��ӿ�F�������Ĺ��I��I���S���Ї�����2025�������ԵČ�ʩ�c“���I4.0”�����M���҇�����܇���Cе��ұ����ӡ������ȶ��ИI�����˹��֒������Iģʽ�����D���ڸ�Ч����ȫ�Ĺ��I�C���˼���ϵ�y���棬����ͨ�İ��\���I�C���˶����A���O���Ô[���c��ץȡ�c��һ�㶼����ʾ�̵ķ����\�У��@�N���Iģʽ���܌����a������r���h���M�Ќ��r��λ���������R�e����ۙ�����Д࣬�����R�e�����ߴ硢�����Ƿ�ϸ��܉����M�з֒����ֻ�DZ��ӵĈ��г���ҕ�X���gʹ�C��������һ�ӓ����۾������������Д�������ͨ�^����h����ҕ�X�^�죬���������m���h����������ʹ�ù��I�C���˵Ĺ����|���c�`���Եõ���ߡ����ľ��I�C����ҕ�X���\ϵ�yͨӍ�����������OӋչ�_̽ӑ��
�����P�I�~�����I�C����;ҕ�X;ͨӍ;���\
��������
�������I�C�����ڰ��\���I�r������]��ҕ�X�������o�C�����ṩ�������횱��־��ȹ̶���λ�úͷ���ˌ�ÿһ�ض��Π�����Ҫ�Ì��T����Ӷ�ʽ���������ϣ��@�Ӳ��ܱ��C�C���˜ʴ_��ץȡ�����������������Π�w�e��������ԭ���Еr���ܱ��C�ṩ�̶���λ�úͷ����ߌ��ڶ�N�����С�����ĮaƷ�ò�ͬ���������Dz������ģ��@�r�ÙC��ҕ�Xϵ�y��������֮�e����λ�Ͷ��������C�������������ȡ�������b��t��һ�N������Ч�ķ�����
�������P�ڿ����]������ȼ�C�c�����1980�ꄓ�������Pע��ȼ�C���C�����P�I�㲿���ļ��g�ԾC�Ͽ���ڸ��ИI��λ�Ĵ���֧�ֺ͟�������£��s־�ѳɞ�����������a���g�ͽ��Ĉ@�أ��˽���������M���g�Ĵ��ڣ����ȼ�C�ИI���С����a�lչ���˷e�O���ã��ܵ��ˏV�̼��g�ˆT�Ěgӭ��
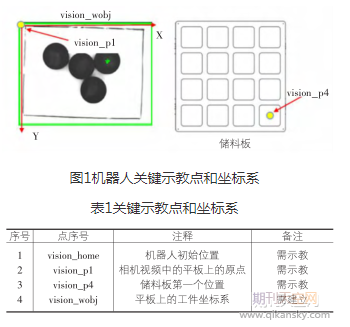
����1ҕ�X���I�C���˰��\ϵ�y�ęCе�Y��
����ҕ�X���I�C���˰��\ϵ�y�Cе������Ҫ����헣�������ֱ�����ɶșC���˱��w(��ҕ�Xϵ�y���b���A��)��������P�����DĿ�˱P��������P�̶��ڙC���˱��w�҂ȣ��P���ľ��x�C��������300mm��ԓ�̶�λ�ÿ��{���H���{���C���˵ľֲ��Ñ�����;���DĿ�˱P�̶��ڙC���˱��w��ȣ��P���ľ��x�C���˱��w����λ��300mm�������\����r�£����DĿ�˱P�������D(Ŀǰ����Ҫ���b��ʴ_���_��100%��ǰ���£�����D�ٿ��_450°/s)���C�������Ȍ��]�И�̖�ķ��ι����ɹ�����P���\���b�������DĿ�˱P���ĵķ��Ύ�λ;��һ�����C����ĩ���Ƅ���������P�Ϸ����̶��ڙC����ĩ�˵�ҕ�X�z�yϵ�y�R�e����P�Ȯ�ǰ��λ�й����ľ�̖��Ȼ���əC���ˌ��������\���b�����������D��Ŀ�˱P��Ŀ�˱P�ĈA�Ύ�λ���о�̖��Ҫ���b���Ĺ�����̖�c��λ��̖һ�¡�ԓҕ�X���I�C���˹���վ�߂��ҕ�X�R�e�Լ��C�����b�������M���a�b�����Ҫ�h����
����2ϵ�y��������
�����Ôz��C�������M���Ĕz��������Ƭ�M�ЈD��ɼ����A̎������ȡ������������������Ɍ������ij�ʼ��λ������Mo-tocom32ͨӍܛ�������ɵ�JOB�ļ�����MOTO-MANXRC���ƹ��У��ɿ��ƹәC����ʰȡ������ʰȡ������ɺ����Ôz��C�������գ����Ĕz��Ƭ�еČ��Hʰȡλ�ú�֮ǰ�������ָ��ʰȡλ�Ì��ȣ�Ӌ���ʰȡλ��ƫ��ֵ������ƫ��ֵ�Q��əC����ϵ�y�����P���cP������(px��py��pz)�ͷ���ʸ��n��o��a�IJ�ֵ����λ��ƫ��ͨ�^Mo-tocom32ܛ��������ƹ��M�����A�Ⱦ��õ�Ŀ��λ�ã����ƙC���ˌ��������_�ط����ں��m��λ�á�
����3ҕ�X���\�C���˳����OӋ
����3.1���I���C���{ԇ
����ҕ�X���\ģ�K��Ҫ��ʹ�ù��I���C�������M�ж�λ�������C����ҕ�X���\����ǰ������Ҫ������ҕ���I���C���{ԇ���{ԇ�ķ��������E�Ʌ��ծaƷ�f������
����3.2�����OӋҪ��
�������֮ǰ����վ��̎����� �B�����ς���ϵ�y�ϟo���ϡ��C������צ���_���C�����ڳ�ʼλ�á����C��Դ�_�������K�ջء��O��z���ꮅ�����Ӱ��o��ϵ�y�_ʼ�\�У���������Gɫ��ָʾ��������ϵ�y�����Ϸ��������ς��͎���ʼ̎��1̖��늂������z�y�������ϣ��������ς��͎�늙C�����ς��͎������ς��������\��ʼ̎�r�������K��סͬ�r2̖�������z�y�������ϣ����͎�늙Cֹͣ��ҕ�X���C�R�e����λ�á����˵���Ϣ��Ȼ���^ܛ���㷨����Ϣ�w��C���ˌ�ҕ�X���C��������Ϣ�����ϰ��\Ҏ�����бP�����\��ɣ����K늴ž�Ȧ��늿s�أ������ӂ��͎����M����һ�����ϵİ��\��
����3.3�C�����P�Iʾ���c������ϵ�Ĵ_��
�������C�{ԇ��ɺ��_ʼ�����C���˳���ҕ�X���\ʹ�Æ����Pʰȡ�ͷ��ù�������Ҫ�������PTCP������������danxipan_t;���P��λ�������^��Ҫ�����P������ƽ���X��Y����ƫ�ƣ���Ҫ����һ��ҕ�X��������ϵ��������vision_wobj�����C���rҕ�l�����Ͻǵ��c��ҕ�X��������ϵ��ԭ�c��������ƽ��������ӛ̖��Ȼ��ʾ��ԓԭ�cvision_p1�����ϰ��ϵ�һ��������λ��ӛ���ʾ���cvision_p4�У���D1��ʾ�������C�����P�Iʾ���c������ϵ���ɴ_�����\�������ʾ���c������ϵ��Ҋ��1��
����3.4��ʰȡλ��ƫ��Ľ�Q����
�����A�Ⱦ��g�ù�����ָ��ʰȡλ��x1��y1��z1����D2��ʾ�����C����ʰȡ�������Ƅӵ������c4�r����ʰȡ�����M�����գ�Ȼ������Ƭ�M�ЈD��̎������ȡ����������Ӌ������Hʰȡλ��x2��y2��z2���ó�ʰȡλ��ƫ���cx=x2-x1��cy=y2-y1��cz=z2-z1�����C���˰����A���O���ij���ָ���Ƅӵ��O��Ŀ��λ�ø����c7�r���˕r�C�����ֲ����cP��λ�����˞�(px��py��pz)���ڴ˻��A���c�õ���ʰȡƫ��ֵ��ӣ����õ����]ʰȡƫ��ֵ�ڃȵ����_Ŀ��λ��(mx��my��mz)����mx=px+cx��my=py+cy��mz=pz+cz��ͬ�����A�Ⱦ��g�ÙC�����ֲ����cP����������ʸ����n1��o1��a1��Ӌ������Hʰȡ�r���cP�ķ���ʸ����n2��o2��a2���ó����cP����ʸ��ƫ���d0=n2-n1��e0=o2-o1��f0=a2-a1���˕r�C�����ֲ����cP�ķ���ʸ����n��o��a���ڴ˻��A���c�õ���P�cʸ��ƫ����ӣ����ó����]ʰȡƫ��ֵ�ڃȵ����_Ŀ��ʸ��d��e��f����d=n+d0��e=o+e0��f=a+f0�����ó������_Ŀ��λ�ú��ˑB�����ʽ�����ó������C�������Pλ�˵����_Ŀ�˾��T'����C����ͨ�^����Ҏ���õİ��\܉�E���ù�����
�����Y�Z
��������ҕ�X�Ĺ��I�C����ϵ�y�^�õ��ں��˹��I�C���ˡ��������C����̫�WͨӍ�����M���g���Ɍ����I�F�������a�΄��`���OӋ��ͨ�^�{ԇ�\����Ч������ˌ����I�C���˿��Ƶ�����͑��á����I�C���ˑ��Ì��IԺУ���_�l�n�̻��e�k���ܸ�ِ�ǿɸ���ԓϵ�yӲ���OӋ�����C���˵İ��\�a�⾎�������_�l���c��ʹ�C���˸������N��ͬ�΄�Ҫ���M�о����{ԇ����������B��������ܑ����˲š�——Փ�����ߣ�����
SCISSCIAHCI