�l(f��)���r�g��2022-04-25���ٷ�����̎��QՓ���g�[��1��
ժ Ҫ�� ��ժҪ�� �鹝(ji��)�s��Դ�������ŷţ���늻�ϵĻ�τ�����܇�õ������l(f��)չ������늙C(j��)�ă����b�ã����y(t��ng)����늳ع����ܶȵ͡�ѭ�h(hu��n)�����̣��Ƽs����τ�����܇�İl(f��)չ������ᘌ��������\�еĂ��y(t��ng)С�Ϳ�܇�����ȸ���(j��)��܇�����������늙C(j��)�͏�(f��)���Դ�����b�õ�ƥ���O(sh��)Ӌ��ͨ�^ DC-
������ժҪ�� �鹝(ji��)�s��Դ�������ŷţ���늻�ϵĻ�τ�����܇�õ������l(f��)չ������늙C(j��)�ă����b�ã����y(t��ng)����늳ع����ܶȵ͡�ѭ�h(hu��n)�����̣��Ƽs����τ�����܇�İl(f��)չ������ᘌ��������\�еĂ��y(t��ng)С�Ϳ�܇�����ȸ���(j��)��܇�����������늙C(j��)�͏�(f��)���Դ�����b�õ�ƥ���O(sh��)Ӌ��ͨ�^ DC-DC ģ�K���F(xi��n)��(f��)���Դ�Ĺ��ܣ��Ķ����ó������“�������”�����ԣ��������l�����늌���늳����ܵ�Ӱ푡���Σ��O(sh��)Ӌ�˻��ڰl(f��)�әC(j��)Ч�ʵ�ģ�����������f(xi��)�{(di��o)�l(f��)�әC(j��)�c늙C(j��)���D(zhu��n)�ط��䣬���F(xi��n)�l(f��)�әC(j��)�ڸ�Ч�^(q��)�\�С������ģ�KǶ�� ADVISOR ܛ���У��ڳ��й��r����܇�����M(j��n)�з���ԇ��C����������Ļ���ģ�����Ʋ��Եď�(f��)���Դ���S�(q��)�ӻ�τ�����܇�����ܡ�
�������P(gu��n)�I�~�� ��(f��)���Դ ������� ģ������ ADVISOR ܛ�� ��τ���
����0 ����
�����S��ȫ����Դ��ȱ���˂����ڭh(hu��n)�����}�՝u��ҕ���h(hu��n)�����o(h��)�c����Դ�_�l(f��)���}��u�ɞ�����������c�P(gu��n)ע�ğ��c[1]�����@�N�΄��£���܇�ИI(y��)������Դ��܇���g(sh��)���о������l(f��)չ����τ�����܇�ѽ�(j��ng)�ɞ��Q�h(hu��n)�����}����ԴΣ�C(j��)����Ҫ����[2]�����y(t��ng)��τ�����܇����Æ�һ��늳������Դ����늳ش������������ܶȵ͡����ٳ������y��ѭ�h(hu��n)�����̵�ȱ�c���Ƽs�˻�τ�����܇�İl(f��)չ[3]������������t���бȹ��ʴ���Ѹ�١������L�ȃ�(y��u)�c�������c��늳ز�(li��n)����(g��u)�ɏ�(f��)���Դϵ�y(t��ng)�����ܰl(f��)�]���߱������ͱȹ��ʵă�(y��u)�ݣ��������ó������“�������”�����c������������늳صě_�����Ķ����L늳ص�ʹ�É��������τ�����܇������[4-7]��
�������τ�����܇��ȼ�ͽ�(j��ng)��(j��)�Ժ��ŷ����ǻ�τ�����܇�о������c��Ŀ��(bi��o)����һ����ȡ�Q�ڶ�����Դϵ�y(t��ng)��������Ч����ߣ���ȡ�Q����܇��������������( ��Q����Ʋ��ԡ������������) ���������ܿ���֮һ��ģ��߉���ƣ���ģ������������ģ��f(xi��)�{(di��o)܇�v���������������ӣ���һ�N��Ч�Ŀ��Ƽ��g(sh��)���܉�ʹ��܇�������_(d��)�����[8]�������t�ڡ�ISG ��τ���늄���܇���D(zhu��n)�ؿ��ơ�һ�����l(f��)�әC(j��)�����D(zhu��n)���c��(d��ng)ǰ���Ч���D(zhu��n)�صı�ֵ����늳� SOC ����ݔ�룬��늙C(j��)�D(zhu��n)������ݔ���O(sh��)Ӌ��ģ��߉������[9]; ����ľ�ڡ���(li��n)ʽ��τ�����܇ģ�����Ʋ��Լ���(y��u)���о���һ�����Ի�τ�����܇�������D(zhu��n)�غ���늳� SOC ��ݔ�룬�l(f��)�әC(j��)�����D(zhu��n)�؞�ݔ���O(sh��)Ӌ��ģ��������[10]; ���ӻ��ڡ���τ�����(q��)��ϵ�y(t��ng)��ģ�����Ʋ����о�������늳� SOC ��܇�vؓ(f��)�d���ʞ�ݔ�룬�l(f��)�әC(j��)Ŀ��(bi��o)���ʞ�ݔ���O(sh��)Ӌ��ģ��߉������[11]; ����ڡ���τ����Ď�܇�v����������Ʋ����о�������늙C(j��)�������ʺ�늳� SOC ��ݔ�룬�l(f��)�әC(j��)Ŀ��(bi��o)���ʞ�ݔ���O(sh��)Ӌ��ģ��߉������[12]; �Ǻ��[�ڡ���τ�����܇�Ŀ��Ʋ��ԃ�(y��u)���о�������늙C(j��)�D(zhu��n)�١���늳� SOC ����܇����Ť���c�l(f��)�әC(j��)���Ť�صı�ֵ��ݔ�룬�l(f��)�әC(j��)Ŀ��(bi��o)Ť�؞�ݔ���O(sh��)Ӌ��ģ��������[13]��
�������ĵ�Ŀ��(bi��o)�ǽ������Џ�(f��)���Դϵ�y(t��ng)�ĺ��S�(q��)�ӻ�τ�����܇���O(sh��)Ӌ����ģ��Ҏ(gu��)�t�������������ԁ���C��܇���ܡ����ȣ������˿�܇�ĺ��S�(q��)�ӷ���ģ�ͣ�����(j��)��܇������Ҫ�������늙C(j��)�̈́���늳ص�ƥ��Ӌ�㼰��ģ����Σ��O(sh��)Ӌ����늳� - ������ݵď�(f��)���Դϵ�y(t��ng)�Լ� DC-DC �p��׃�Q�������F(xi��n)��(f��)���Դ�Ĺ��ʷ��䡣�ٴΣ�����(j��)��܇����Ҫ������r���������ڰl(f��)�әC(j��)Ч�ʵ�ģ��������������ϵ�y(t��ng)�����F(xi��n)��܇�������䡣�����������܇ģ�͡���(f��)���Դģ�ͺ�������������Ƕ�� ADVISOR ܛ�����M(j��n)����܇���ܷ���ԇ��C�˿��Ʋ��Ե���Ч�ԡ�
����1 ��τ�����܇��������(sh��)ƥ�估��ģ
����1. 1 ��܇���S�(q��)�ӽ�ģ
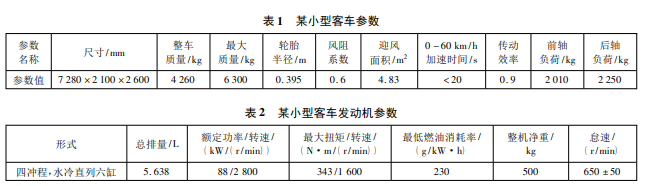
������ijС�Ϳ�܇��ԭ�ͣ��O(sh��)Ӌ��τ�����܇���������M(j��n)�Ѕ���(sh��)ƥ��ͽ�ģ��ԓ��܇ԭ�Ѕ���(sh��)��� 1 ��ʾ����l(f��)�әC(j��)����(sh��)��� 2 ��ʾ��
�������ղ�(li��n)��τ�����܇�ĽY(ji��)��(g��u)������(j��)�l(f��)�әC(j��)�ą���(sh��)�����������������f���������������� M �ļ�������ԓ��܇�İl(f��)�әC(j��)����ģ�͡����� ADVISOR�����(q��)����ʽ��ǰ݆�(q��)�ӣ���ԓ��܇���ú�݆�(q��)�ӣ������ ADVISOR ܛ������Ҫ������������ģ�K�M(j��n)�к��S�(q��)�ӵ����_�l(f��)����Ҫ�����Ѓɂ�ģ�K�M(j��n)�������O(sh��)Ӌ�cӋ��: ��һ����܇����������ģ�K����Ҫ���Ơ����������^݆̥�c����ĸ�����; �������܇�ٶȲ��ܳ��^������������ṩ�����܇��[14]����D 1 ��ʾ�齨���õĠ���������ģ�K��
����1. 2 ��τ�����܇늙C(j��)ƥ��
������τ�����܇��܇����Դ�Ĺ��ʱ�횝M����܇��������ָ��(bi��o)���������܇�١����ٕr�g���������Ҫ��Ĺ�������[14]������܇������O(sh��)Ӌ܇�ٞ� 95 km /h���������ܲ��ÿ�܇�ij�ʼ�ٶ� 0 ���������܇�� 60 km /h �ļ��������M(j��n)���u�r����܇���Ѕ^(q��)�\�У����¶Ȟ� 0. 1���ڼ�늄�ģʽ�µĿ�܇܇�ٞ� 40 km /h������(j��)܇�v���ܵ�Ҫ��Ӌ��늙C(j��)���ʑ�(y��ng)���� 15. 88 kW������x���~�����ʞ�20 kW �ğoˢֱ��늙C(j��)��ȡ���ֵ���ʞ� 40 kW����(d��ng)��τ�����܇�ڼ�늄�ģʽ�����r��늙C(j��)ͨ�^���p����ֱ���(q��)��܇�v��늙C(j��)������D(zhu��n)�ّ�(y��ng)�M�㼃�����܇��Ҫ��(j��ng)Ӌ�㲢���]늙C(j��)���^�dϵ��(sh��)���_����늙C(j��)���~���D(zhu��n)�ٞ�3 250 r/min��
��������(j��)Ӌ��_����늙C(j��)����(sh��)���x�����şoˢֱ��늙C(j��)��늙C(j��)����(sh��)��� 3 ��ʾ��
����2 ��(f��)���Դ�O(sh��)Ӌ
������(f��)���Դ������늳��c������ݲ�(li��n)��ʽ��늳؞����Դ���ṩ늙C(j��)��ƽ�������ʣ�������ݳ�����������ŵă�(y��u)�c�������o���Դ���ڻ�τ�����܇�����¡����ټ��Ƅӵȴ�������r�¹������l(f��)�]“�������”�����ã��M��˲�r���������o(h��)��늳أ��p������_�����Ķ����L��늳ص�ʹ�É�����
�����x���Ї����ͳ��й��r���� ADVISOR �н���ѭ�h(hu��n)���r��������D 2 ��ʾ��ѭ�h(hu��n)�r�g�� 1 304 s�����܇�ٞ� 60. 35 km/h��܇�v�����x�� 5. 87 km��
������ԓѭ�h(hu��n)���r�M(j��n)�������ʷֽ⣬����ؓ(f��)��������քe�e�֣��Ķ���ÿ�܇�(q��)��ģʽ�c�Ƅ�ģʽ����(y��ng)����ؓ(f��)����������������������� 1. 088 × 107 J��ؓ(f��)��������� - 2. 160 × 106 J���ٌ��(q��)�Ӻ��Ƅ�ѭ�h(hu��n)�r�g�M(j��n)�нy(t��ng)Ӌ��ͣ��õ��(q��)�Ӻ��Ƅ�ģʽ�µ�ƽ����������s�� 10 kW������ֵ���ʼs�� 36 kW��
����2. 1 ��늳���(sh��)ƥ��
��������(j��)��܇���ܺ�Ӌ��õ���ƽ���������������늳صą���(sh��)ƥ��Ӌ��ͽ�ģ������ GB /T 31466 - 2005��늄���܇�߉�ϵ�y(t��ng)�ȼ������_����τ�����܇��늳ؽM���~��늉��ȼ��� 144 V��늳ؽM�ą���(sh��)횝M�����ɂ��l��: �M��܇�v���ģʽ���m(x��)����̵�Ҫ��; �M��ָ��ѭ�h(hu��n)���r��ƽ����������
����2. 2 ������݅���(sh��)ƥ��
������ DC-DC �����D(zhu��n)�Q�������Կ�֪����(d��ng)��(f��)���Դϵ�y(t��ng)�г�������c��늳ؽM��늉��ȼ��ӽ��r��DC-DC ����׃�Q��Ч����ߣ��ʸ���(j��)ǰ�Ĵ_������늳ؽM늉� 144 V���x�� 56 �����w���늉��� 2. 5 V �ij�����ݘ�(g��u)�ɏ�(f��)���Դϵ�y(t��ng)�ij�����ݲ��֡�
�����鱣�C�������Ч�ʣ���С늉�ͨ��ȡ���늉���һ�룬�� 1. 25 V����(j��ng)Ӌ��õ�������ݵ�������(y��ng)���� 2 743 F������x�� Maxwell ��˾���a(ch��n)�ij�����ݣ���������(sh��)����: ���늉��� 2. 5 V����С � �� �� 1. 25 V��� �� �� 3 000 F��� �� �� �� ��- 225 - 225 A��
����2. 3 DC-DC �����D(zhu��n)�Q���O(sh��)Ӌ
��������(j��)�����غ�ԭ�t����ݔ�����ʵ���ݔ�빦�ʳ��� DC-DC �D(zhu��n)����Ч�ʣ��O(sh��)Ӌ DC-DC �����D(zhu��n)�Q�������ڹ����D(zhu��n)�Q����Ч������늳ؽM�c������ݶ�늉���ֵ��ݔ�빦�ʵĶ��κ���(sh��)��������ö��β�ֵ��ʽ���� DC-DC �D(zhu��n)�Q��ģ�ͣ���D 3 ��ʾ��
�����������õ���늳�ģ�͡��������ģ�ͺ� DCDC �����D(zhu��n)�Q��ģ��Ƕ�� ADVISOR ܛ���У����Џ�(f��)���Դϵ�y(t��ng)��(n��i)���Y(ji��)��(g��u)��D 4 ��ʾ����(f��)���Դ�Ŀ��Ʋ��Բ���߉�T�ޞV�����Ʋ��ԣ������в���Ԕ����
����3 ��܇ģ�����Ʋ����O(sh��)Ӌ
������ģ�����Ʋ��ԑ�(y��ng)���ڻ�τ�����܇��ͨ�^���l(f��)�әC(j��)���Hݔ���D(zhu��n)���M(j��n)���{(di��o)��(ji��)���ڝM����늳س���ƽ���ǰ���£�ʹ�l(f��)�әC(j��)�M���ܹ����ڸ�Ч�^(q��)��ݔ���D(zhu��n)�ؽӽ��l(f��)�әC(j��)����D(zhu��n)�أ��������l(f��)�әC(j��)����Ч�ʡ�ģ�����Ʋ��Բ����pݔ���ݔ����ʽ���l(f��)�әC(j��)Ŀ��(bi��o)�D(zhu��n)���c��(d��ng)ǰ�����D(zhu��n)��֮�����늳� SOC ��ݔ�룬�l(f��)�әC(j��)���Hݔ���D(zhu��n)�؞�ݔ����
������ʹ�l(f��)�әC(j��)���H�����c�����l(f��)�әC(j��)��Ч�^(q��)���l(f��)�әC(j��)��Ŀ��(bi��o)�D(zhu��n)�ؑ�(y��ng)����(j��)�l(f��)�әC(j��)���f������������Q�������f�����������ϣ����ղ�ͬ�D(zhu��n)�٣��x����С���ͺ��c���Դ�����l(f��)�әC(j��)�(y��u)�D(zhu��n)���������ڿ��Ʋ����У�����(j��)��(d��ng)ǰ�l(f��)�әC(j��)�������D(zhu��n)�٣������ƶ����(y��u)�D(zhu��n)���������_���l(f��)�әC(j��)�����ڸ�Ч�^(q��)����(y��ng)��Ŀ��(bi��o)�D(zhu��n)�ء�ԓ��τ�����܇�f������������D5 ��ʾ��
�������f������������֪���l(f��)�әC(j��)����D(zhu��n)��ֵ�� 350 N·m���c������С�D(zhu��n)�صIJ�ֵ�� 350 N·m�����]�R��ֵ����ģ�����Ʋ��Ե��D(zhu��n)�ز� ΔT ��ģ��Փ��_����[- 360 360]N·m����ģ���������Ќ�ݔ�����D(zhu��n)�ز� ΔT ��ģ���Z��׃��ֵ�֞� 7 �n���քe��“����”��“����”��“��С”��“��”��“ؓ(f��)С”��“ؓ(f��)��”��“ؓ(f��)��”���քe����ĸ PB��PM��PS�� ZO��NS��NM��NB ��ʾ���x�������`�ٶȺ���(sh��)��Ӌ���Z��׃�����Z��ֵ���`�ٶȳ̶ȣ���Ɍ����_����ģ������ģ������������һ��ݔ�����늳� SOC ֵ��SOC ֵ��ȡֵ������[0��1]���� SOC ��ģ���Z��׃��ֵ�֞� 5 �n���� �e ��“�� ��”�� “��С”��“��”��“ؓ(f��)С”��“ؓ(f��)��”���քe����ĸ PB�� PS��ZO��NS��NB ��ʾ��ͬ���x�������`�ٶȺ���(sh��)���ģ������
����ģ����������ݔ����l(f��)�әC(j��)ݔ���D(zhu��n)������ K��ݔ���D(zhu��n)������ K �ǰl(f��)�әC(j��)ݔ������D(zhu��n)���c����D(zhu��n)�صı�ֵ������(j��)�f������������ݔ���D(zhu��n)�����ӵ�ȡֵ������[0��1. 4]��ģ������������ Sugeno ����ͣ���ȥģ�����Y(ji��)�ϵ�ģ�������У��õ�����ݔ�����龫�_������� K ȡֵ����[0 0. 2 0. 4 0. 5 0. 6 0. 7 0. 75 0. 8 0. 85 0. 9 0. 95 1 1. 05 1. 1 1. 15 1. 2 1. 25 1. 3 1. 35 1. 4]���քe�� K1��K2��…��K21 ��ʾ��
�����������Ĵ_����ݔ��ݔ����������ģ��Ҏ(gu��)�t��� 4 ��ʾ�����O(sh��)Ӌ��ɵ�ģ������ģ��Ƕ�� ADVISOR ܛ���У��ڈD 4 �Ļ��A(ch��)����Qԭ�е�늙C(j��)�o�����ƣ�������τ�����܇플�ģ����D 6 ��ʾ��
����4 ������C
����������C�����������ď�(f��)���Դϵ�y(t��ng)����܇ģ�����Ʋ����m���ں��S�(q��)�ӻ�τ�����܇����Ч�ԣ��� ADVISOR ����h(hu��n)�����M(j��n)�н�ģ�ͷ���������x��D 2 ��ʾ���Ї������r��yԇ���r��ͬ�r�c ADVISOR ԭ�е���܇�D(zhu��n)�ؿ��Ʋ����M(j��n)�Ќ����о���
�������ȣ���ԭ�е�늙C(j��)�o�����Ʋ��Ի��A(ch��)�ϣ���C��(f��)���Դ����Ч�ԡ���܇�Č��H�\��܇����D 7 ��ʾ���D�Ѓɗl�����քe��ʾѭ�h(hu��n)���r��Ҫ��܇�ٺ͌��H܇�١��ĈD�п��Կ��������H܇�ٺܺõظ��S�˹��r��Ҫ��܇�٣��f���O(sh��)Ӌ�ď�(f��)���Դϵ�y(t��ng)��(y��ng)����ԓ��τ�����܇�����ԝM��ѭ�h(hu��n)���rҪ��
�������P(gu��n)֪�R���]��Փ�ă�(y��u)�Ȍ������M��
������һ�Դ��늙C(j��)��������ȫ������늳��ṩ���书��������D 8 ��ʾ���ɈD��֪����늳��ṩ��������_(d��)�� 23 kW����늳ع��������D 9 ��ʾ���D����늳�횳����^��ķ�늺ͳ����������������ӽ� 250 A�����������ӽ� 90 A�����ҳ�������������@����������늳ص�ʹ�É�����
������(f��)���Դ��늙C(j��)���������ɏ�(f��)���Դϵ�y(t��ng)�ṩ��������늳��ṩƽ�����ʣ�����ֵ�����ɳ�������ṩ���书�ʌ���������D 10 ��ʾ���ɈD��֪����늳��ṩ������ʃH�� 10 kW���c��һ�Դ���ṩ 23 kW ������ȣ����� 50% ���ϡ���������ṩ��늙C(j��)�����ʵ�˲�B(t��i)���֣���ְl(f��)�]�����ŵ����ԡ���(f��)���Դ����늳غͳ�����ݵĹ��������D 11 ��ʾ���D����늳��ڳ��ܷ����������چ�һ�Դ�r���@�pС�����������H�� 70 A�����ҷ����������^С�������������늳صĉ������ڈD 11 ��ؓ(f��)�����ʾ���������ĈD�п��Կ�����늳س��������٣�������ݵij����������^�࣬����ȫ���ij������ɳ�����ݻ��գ���ˌ�(d��o)����늳� SOC ֵ�����½����� SOC �������w׃ƽ��(w��n)���f����늳��^�õر����˳��늵�ƽ�⡣��һ�Դ�͏�(f��)���Դ����늳� SOC ������D 12 ��ʾ��
������Σ�����C�ˏ�(f��)���Դϵ�y(t��ng)��Ч�ԵĻ��A(ch��)�ϣ��^�m(x��)��C�����O(sh��)Ӌ����܇ģ���D(zhu��n)�ؿ��Ʋ��Ե���Ч�ԡ���ģ�����Ʋ���ּ�ڝM����܇���ܵ�ͬ�r������߰l(f��)�әC(j��)����Ч�ʣ��Ķ������ŷţ���߽�(j��ng)��(j��)�ԡ��D 13 �еăɂ��D�քe�� ADVISOR ԭ��늙C(j��)�o�����Ʋ����º�ģ�����Ʋ����°l(f��)�әC(j��)���H����Ч���c�D���܉����@��������ԭ�в����£��l(f��)�әC(j��)Ч������m�_(d��)���� 0. 4�����ǹ����c��ɢ�����wЧ�ʲ��ߡ���ģ�����Ʋ����£��l(f��)�әC(j��)�Ĺ����c�����ܼ���Ч�ʼ����� 0. 3 - 0. 4 ֮�g�Ĺ����c���࣬�f���l(f��)�әC(j��)���wЧ�������������D 14 �еăɂ��D�քe�� ADVISOR ԭ��늙C(j��)�o�����Ʋ����º�ģ�����Ʋ����°l(f��)�әC(j��)���H�����c�D���ɈD����Ҳ�����@�����l(f��)�әC(j��)�����c��������Ч�^(q��)��
������ģ�����Ʋ����µď�(f��)���Դ����늳� SOC ��������D 12 �У��õ���һ�Դ����(f��)���Դ��ģ�����Ʋ�����(f��)���Դ����늳� SOC �������ȈD����D 15 ��ʾ��������ģ�����Ʋ����£��l(f��)�әC(j��)�ӽ���Ч�^(q��)��ͬ�r�l(f��)�әC(j��)���Hݔ���D(zhu��n)��������ߣ���ˌ�늙C(j��)�������������ͣ���������늳� SOC �^�͕r���ԝM����܇��������֮��İl(f��)�әC(j��)�D(zhu��n)�أ��Á����늳س�늣����и���ij���������늳س�늣���������ڱ��C��늳� SOC ƽ��(w��n)���D��ͨ�^ģ����������늳� SOC �����������@�������c늙C(j��)�o����������늳� SOC ������ȣ�ģ����������늳� SOC ����׃��ƽ��(w��n)���ҽKֹ�r�� SOC ֵ�^�ߣ���늳�������ѭ�h(hu��n)���r�������^С����������늳ر��ָ��ߵĺ��������
����5 �Y(ji��)�Z
����������ԭ����ͨȼ�Ϳ�܇�Ļ��A(ch��)�ϣ��ڝM��܇�v���ܵ�ǰ���£���������˃����b�ú�늙C(j��)��ƥ���O(sh��)Ӌ������_�l(f��)����늳� - ������ݵď�(f��)���Դϵ�y(t��ng)���������ˑ�(y��ng)���ڏ�(f��)���Դ��τ�����܇��ģ���D(zhu��n)�ط�����ԣ�����������܇ģ�͡���(f��)���Դģ�͡�������������Ƕ�� ADVISOR ܛ���У��M(j��n)����܇���ܷ��棬�Y(ji��)������:
����( 1) ����к��m����(sh��)��늙C(j��)����늳صĻ�τ�����܇���܉�M��ԭ�п�܇��������ܵ�Ҫ���C���O(sh��)Ӌ�Ļ�τ�����܇���Ќ��Hʹ�Ãrֵ��
����( 2) ��������늳� - ������ݏ�(f��)���Դϵ�y(t��ng)���܉�l(f��)�]�������“�������”�ă�(y��u)�ݣ�DC-DC �����D(zhu��n)�Q���܉�?q��)��F(xi��n)���ʷ�������������늳��l����������늣����L����늳�ʹ�É�����
����( 3) ����Ļ��ڰl(f��)�әC(j��)Ч�ʵ�ģ���D(zhu��n)�ط�����ԣ��܉�ʹ�l(f��)�әC(j��)�����ڸ�Ч�^(q��)������˰l(f��)�әC(j��)����Ч�ʣ�ͬ�r��������늳س���ƽ�⣬�ڱ��C��܇���ܲ�׃��ǰ���£��������ŷţ����L����늳؉�����——Փ�����ߣ�ţ���ࡢ�T����
���������īI(xi��n)
����[1] �R����. �P(gu��n)������Դ��܇���g(sh��)�l(f��)չ�����о�[J]. �r����܇��2018( 8) : 52-53.
����[2] �������n���T���_����. ���ڄӑB(t��i)Ҏ(gu��)���㷨�Ļ�τ�����܇���M(j��n)�� ECMS �������������о�[J]. �Ї��C(j��)е���̣�2018��29 ( 3) : 326-332.
����[3] ����. 늄���܇�Ä���늳ذl(f��)չ�C��[J]. �Դ���g(sh��)�� 2015��39( 7) : 1567-1569.
����[4] ���գ���С�A�������x����. ���ʷ���ʽ��τ�����܇��(f��)���Դϵ�y(t��ng)�O(sh��)Ӌ[J]. ����������W(xu��)�W(xu��)��2017��37( 5) : 478-484.
����[5] �������O�������_ӡ��. ��τ���늄���܇�ď�(f��)���Դ���ʷ�����Ʋ���[J]. 늹����g(sh��)�W(xu��)��2017��32( 18) : 143-151.
����[6] ���c�꣬���Զ������h(yu��n)��. ��(f��)���Դʽ��τ�������܇���ʷ�������о�[J]. ��܇���̣�2014��36( 4) : 389-393��425.
����[7] �߽�ƽ�����ԣ��w����. ��(f��)���Դϵ�y(t��ng)���ʷ�������о�[J]. ������ͨ��W(xu��)�W(xu��)��2015��49( 7) : 17-24.
����[8] VU T V��CHEN C K. A Fuzzy-based Supervisory Controller Development for a Series Hydraulic Hybrid Vehicle[C]. AETA 2017- Recent Advances in Electrical Engineering and Related Sciences: Theory and Application��2017: 850-859.
����[9] �����t����ͦ�����������. ISG ��τ���늄���܇���D(zhu��n)�ؿ��Ʋ���[J]. �ؑc������W(xu��)�W(xu��)��( ��Ȼ�ƌW(xu��)��) ��2014��28( 11) : 18-23.
����[10] ����ľ�������. ��(li��n)ʽ��τ�����܇ģ�����Ʋ��Լ���(y��u)���о�[J]. �y�ؼ��g(sh��)��2014��33( 12) : 72-76.
����[11] ���ӻ�. ��τ�����(q��)��ϵ�y(t��ng)��ģ�����Ʋ����о�[J].��Ӽ��g(sh��)��(y��ng)�ã�2014��40( 3) : 140-142.
����[12] ���. ��τ����Ď�܇�v����������Ʋ����о�[J].Ӌ��C(j��)���棬2013��30( 5) : 152-157.
����[13] �Ǻ��[����ӿ���~�M(j��n). ��τ�����܇�Ŀ��Ʋ��ԃ�(y��u)���о�[J]. �p����܇���g(sh��)��2014( 3) : 7-12.