�l(f��)���r(sh��)�g��2022-03-02���ٷ��늹��QՓ���g�[��1��
ժ Ҫ�� ժҪ �����،���������(d��ng)ϵ�y(t��ng)�ĺ㹦���{(di��o)���\(y��n)�з��������о�����ϵ�y(t��ng)׃�Q��Փ�Ͷ���늙C(j��)ʸ�����ƵĻ��A(ch��)�ϣ������һ�N�����D(zhu��n)�Ӵň�(ch��ng)����ʸ�����ƵĶ���Б�(y��ng)늙C(j��)���׃�O�{(di��o)�ٷ�����ԓ��������Ҫ�~������늙C(j��)�������������ͨ�^(gu��)�D(zhu��n)�Ӵň�(ch��ng)����ʸ�����Ʈa(ch��n)����ͬƽ����C�������
����ժҪ �����،���������(d��ng)ϵ�y(t��ng)�ĺ㹦���{(di��o)���\(y��n)�з��������о�����ϵ�y(t��ng)׃�Q��Փ�Ͷ���늙C(j��)ʸ�����ƵĻ��A(ch��)�ϣ������һ�N�����D(zhu��n)�Ӵň�(ch��ng)����ʸ�����ƵĶ���Б�(y��ng)늙C(j��)���׃�O�{(di��o)�ٷ�����ԓ��������Ҫ�~������늙C(j��)�������������ͨ�^(gu��)�D(zhu��n)�Ӵň�(ch��ng)����ʸ�����Ʈa(ch��n)����ͬƽ����C��������(q��)��(d��ng)늙C(j��)���D(zhu��n)���Ķ�����늙C(j��)��(sh��)�F(xi��n)���ڲ�ͣ���r�µ����׃�O������׃�O�^(gu��)��ƽ�����o(w��)����D(zhu��n)�ز���(d��ng)�������Ծ���Б�(y��ng)늙C(j��)��������(du��)����ķ����M(j��n)�Ќ�(sh��)�(y��n)�(y��n)�C���o���������D(zhu��n)�Ӵň�(ch��ng)����ʸ�������µ� 3 ��(du��)�O�� 9 ��(du��)�O֮�g����׃�O�Č�(sh��)�(y��n)�Y(ji��)������(sh��)�(y��n)�Y(ji��)��������������ķ����܉��ڲ�ͣ늵���r��(sh��)�F(xi��n)���׃�O�{(di��o)�٣���Ч�������늙C(j��)�㹦���{(di��o)���\(y��n)�з�����
�����P(gu��n)�I�~�����׃�O �D(zhu��n)�Ӵň�(ch��ng)����ʸ������ �㹦���{(di��o)�ٷ��� ����Б�(y��ng)늙C(j��)
����1 ����
�������S����(y��ng)�È�(ch��ng)�ϣ���C(j��)�����ŷ�ϵ�y(t��ng)��Ş�����M(j��n)ϵ�y(t��ng)���������(q��)��(d��ng)���w݆��(ch��)��ϵ�y(t��ng)�ȣ�Ҫ�����(d��ng)ϵ�y(t��ng)�����ڵ��ٕr(sh��)�ṩ����D(zhu��n)�أ��־��Ќ��V�ĺ㹦���{(di��o)���\(y��n)�з�����Ȼ��Ŀǰ�ɂ��y(t��ng)����Б�(y��ng)늙C(j��)��(g��u)�ɵĽ�������(d��ng)ϵ�y(t��ng)�{(di��o)�ٷ������ޡ����õĽ�Q�����Ǻ�(ji��n)�εز��ø�����늙C(j��)�ʹ�����׃�l���������@��늙C(j��)�w�e����������������Ҫ�����ڽ�(j��ng)��(j��)����Դ����ɺܴ�����M(f��i)[1-3]��
�������Q��������ȱ�ݣ������W(xu��)���о���늙C(j��)�����@�M�Y(ji��)��(g��u)��ͨ�^(gu��)��׃�����@�M��Ȧ���B�ӷ�ʽ늙C(j��)�����ڲ�ͬ�ĘO��(du��)��(sh��)ģʽ�¡��īI(xi��n)[4]ͨ�^(gu��)�ڵ��ٕr(sh��)���ô�ĘO��(du��)��(sh��)���ڸ��ٕr(sh��)����С�ĘO��(du��)��(sh��)����(l��i)�M����ٴ��D(zhu��n)�غ͌��V�ĺ㹦���\(y��n)�з�����Ҫ���@�N������ȱ�c(di��n)����Ҫͣ��ГQ���ГQ�^(gu��)�̲�ݔ���D(zhu��n)�أ����ГQ�^(gu��)���Dz��B�m(x��)����ƽ���ģ��Л_������͛_���D(zhu��n)�ء��īI(xi��n)[5]ͨ�^(gu��)���Ѓ��� Y ��(li��n)�Y(ji��)������Б�(y��ng)늙C(j��)��(sh��)�F(xi��n)�� 1 ��(du��)�O�� 2 ��(du��)�O֮�g��׃�O������׃�O�ĕ��B(t��i)�^(gu��)���Е�(hu��)�a(ch��n)������������(y��n)��Ӱ��S�еĉ������īI(xi��n)[6-9]��(sh��)�F(xi��n)�˶���늙C(j��)����������߲�ͬ�O��(du��)��(sh��)��������ƣ����Ǜ](m��i)�Ќ�(sh��)�F(xi��n)���׃�O���īI(xi��n)[10]���ö���늙C(j��)����(g��)�������ɶȵ����ԣ���һ�_(t��i)����Б�(y��ng)늙C(j��)�У�ͨ�^(gu��)����늙C(j��)�D(zhu��n)���l�ʿ��Ʈa(ch��n)����ͬƽ����C�������ʹ늙C(j��)�ڲ�ͬ�O��(du��)��(sh��)�����D(zhu��n)�ň�(ch��ng)�����D(zhu��n)����(sh��)�F(xi��n)���ڲ�ͣ���r�µ����׃�O���������(d��ng)�B(t��i)���ܲ��ѡ�
�������P(gu��n)֪�R(sh��)���]��Փ�İl(f��)���(gu��)�H�ڿ����
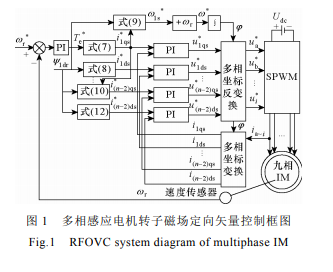
�������Ļ��ڶ���(du��)�O����ϵ�y(t��ng)׃�Q��Փ�����ö���늙C(j��)���ж���(g��)�������ɶȵ����c(di��n)����������D(zhu��n)�Ӵň�(ch��ng)����ʸ�����ƵĶ���Б�(y��ng)늙C(j��)���׃�O��������(sh��)�F(xi��n)���ڲ�ͣ늵���r���B�m(x��)ƽ�������׃�O���،���늙C(j��)�㹦���{(di��o)���\(y��n)�з�����
����2 ���׃�O���g(sh��)�Č�(sh��)�F(xi��n)
����2.1 ���׃�O������Փ
����n ����(du��)�Qϵ�y(t��ng)�ڹ̶�����(bi��o) α-β ׃�Q����(bi��o)ϵ�µĺ㹦������(bi��o)׃�Q��� C ��ʽ(1)��ʾ��ԓ��ꇌ�(sh��)�F(xi��n)�ˌ�(du��)����ϵ�y(t��ng)�Ľ���[11, 12]��ʽ�У�v ���C���Δ�(sh��);1, 2, 3,…v �քe�Ǹ����C��������������(bi��o)ϵ�µ���λ늽Ƕ�;α=2π/n��ʽ(1)��ꇵĵ� 1��2 �И�(g��u)�� q1-d1 ƽ�棬��(du��)��(y��ng)������ƽ��;�� 3��4 �И�(g��u)�� q2-d2 ƽ�棬��(du��)��(y��ng)�� 2 ���C��ƽ�棬������ƿ��Եõ������C��ƽ�档 ��(d��ng) n ��ż��(sh��)�r(sh��)��늙C(j��)���ڵ� q-d ƽ��?zh��n)���(sh��) m=(n-2)/2;��(d��ng) n ���攵(sh��)�r(sh��)��m=(n-1)/2�����@�r(sh��)����(bi��o)׃�Q��� C ��(y��ng)�hȥ���һ�С�������Ҫ�f(shu��)�����ǣ����@�M�Y(ji��)��(g��u)�� 2/n �����ֲ����t��ż���C��ƽ��;���@�M�Y(ji��)��(g��u)��/n �����ֲ����t�](m��i)��ż���C��ƽ�棬��(y��ng)��ԓ�����ȥ����ż���C��ƽ�挦(du��)��(y��ng)�ă��С�����(j��)ʽ(1)������(bi��o)׃�Q��ꇿ�֪���ڶ�����r�¶���늙C(j��)�������׃�Q���γ� m �M α-β �������Q�� m ��(g��)�������ɶȻ��� m ��(g��)����ƽ�档���׃�O��ԭ���������ö���늙C(j��)���ж�������ɶȵ����c(di��n)��ͨ�^(gu��)�������������λ���ɲ�ͬ�O��(du��)��(sh��)�����D(zhu��n)�ň�(ch��ng)���_(d��)������늙C(j��)�����܌�(sh��)�F(xi��n)�IJ�ͣ��µ����׃�O�����w�����׃�Oԭ���Ʌ������ߵ���������[10]��
�����о��;��(bi��o) s��r �քe��ʾ�����D(zhu��n)��;sr ��ʾ���С�����(j��)ʽ(1)�� α-β ׃�Q����(bi��o)ϵ������늉������׃�Q��ֱ��������ʹ늙C(j��)�ڸ���(g��) q-d ƽ�治������ϣ��Ա��M(j��n)�п��ơ�
����3 ��(sh��)�(y��n)�Y(ji��)���������
�������ˌ�(du��)����Ļ����D(zhu��n)�Ӵň�(ch��ng)����ʸ�����ƵĶ���Б�(y��ng)늙C(j��)���׃�O���g(sh��)�M(j��n)���(y��n)�C�������Ծ���Б�(y��ng)늙C(j��)�錍(sh��)�(y��n)��(du��)���(y��n)�C�� 1��3 ���C��ƽ���g׃�O�ГQ�����Č�(sh��)�(y��n)���þ���Б�(y��ng)늙C(j��)����(sh��)���~������ 10kW���~���D(zhu��n)�� 1 000r/min����늉� 232V������� 6.3A���O��(du��)��(sh��) 3����늉�Դ��׃����늣�ֱ��ĸ��늉� 700V����׃���_(k��i)�P(gu��n)�l�� 8kHz����(sh��)�(y��n)늙C(j��)��D 2 ��ʾ��
�����O(sh��)Ӌ(j��)��һ���� 32 λ���c(di��n) DSP TMS320F28335 �� FPGA оƬ cyclone EP1C6240C6 ����ƺ��ĵČ�(sh��)�(y��n)�b�ã���(sh��)�(y��n)�b�õĻ�����D��D 3 ��ʾ��
�����D 4 �����늙C(j��)���D(zhu��n)�Ӵň�(ch��ng)����ʸ�������£��o���D(zhu��n)�� 100r/min(5Hz) �r(sh��)����늉����Ρ���(sh��)�H��늉����κͶ����������(���ϵ���)���ɈD 4 �п�֪�����D(zhu��n)�Ӵň�(ch��ng)����ʸ�������£������C������õ�����Ч�����ƣ��D(zhu��n)�Ӵň�(ch��ng)����ʸ�����Ƶ�Ч��߀���e(cu��)��
�����D 5 ��늙C(j��)�o���D(zhu��n)���� 100r/min �r(sh��) 9 ��(du��)�O�� 3 ��(du��)�O�M(j��n)�����׃�O�Č�(sh��)�(y��n)���Ρ���Ҋ(ji��n)�� 9 ��(du��)�O�� 3 ��(du��)�O׃�O�^(gu��)���У���(d��ng) i3ds �� i3qs ��u�pС�� 0 ��ͬ�r(sh��)�� i1ds �� i1qs ��u��������_(d��)��(w��n)����늙C(j��)��K�� 3 ��(du��)�Oģʽ���\(y��n)�С�
�����D 6 ��늙C(j��)�ڽo���D(zhu��n)���� 100r/min �r(sh��)��3 ��(du��)�O�� 9 ��(du��)�O�M(j��n)�����׃�O�Č�(sh��)�(y��n)���Ρ���Ҋ(ji��n)�� 3 ��(du��)�O�� 9 ��(du��)�O׃�O�^(gu��)���У���(d��ng) i1ds �� i1qs ��u�pС�� 0 ��ͬ�r(sh��)��i3ds �� i3qs ��u������K��(w��n)���\(y��n)���� 9 ��(du��)�Oģʽ�¡�
�����D 7 ��늙C(j��)�ڼ����^(gu��)���M(j��n)�����׃�O��������ٶȲ��Σ��� 9 ��(du��)�O�µ� 30r/min ���ٵ� 3 ��(du��)�O�µ��~���D(zhu��n)�� 1 000r/min���� 333r/min �ĕr(sh��)�̏� 9 ��(du��)�O�ГQ�� 3 ��(du��)�O���ĈD�п�Ҋ(ji��n)��������ķ����ڼ��ٵĄ�(d��ng)�B(t��i)�^(gu��)����Ҳ��(sh��)�F(xi��n)�˺ܺõ�׃�O���^(gu��)���^(gu��)�̱��^���롣
�����D 8 ��늙C(j��)�ڜp���^(gu��)���M(j��n)�����׃�O��������ٶȲ��Σ��� 3 ��(du��)�O�µ��~���D(zhu��n)�� 1 000r/min �p�ٵ� 9 ��(du��)�O�µ� 30r/min���� 333r/min �ĕr(sh��)�̏� 3 ��(du��)�O�ГQ�� 9 ��(du��)�O���ĈD�п�Ҋ(ji��n)��������ķ����ڜp�ٵĄ�(d��ng)�B(t��i)�^(gu��)����Ҳ��(sh��)�F(xi��n)�˺ܺõ�׃�O���^(gu��)���^(gu��)�̱��^���롣�Ɍ�(sh��)�(y��n)�Y(ji��)����֪����������Ļ����D(zhu��n)�Ӵň�(ch��ng)����ʸ�����ƵĶ���Б�(y��ng)늙C(j��)���׃�O�������܉�?q��)��F(xi��n)����늙C(j��)�� 3 ��(du��)�O�� 9 ��(du��)�O֮�g��M(j��n)�����׃�O���U(ku��)��늙C(j��)�ĺ㹦���{(di��o)���\(y��n)�з�����
����4 �Y(ji��)Փ
���������D(zhu��n)�Ӵň�(ch��ng)����ʸ�����ƵĶ���Б�(y��ng)늙C(j��)���׃�O�����Ƕ���늙C(j��)��������(d��ng)ϵ�y(t��ng)��һ��(g��)��Ҫ�M�ɲ��֣�����늙C(j��)�ڲ�ͬ�O��(du��)��(sh��)֮�g�����׃�O�о�����ԓ�����ܔU(ku��)��늙C(j��)�ĺ㹦���\(y��n)�з��������ٕr(sh��)�����^С�ĘO��(du��)��(sh��)�����Ԍ�(sh��)�F(xi��n)���D(zhu��n)�٣�ͬ�r(sh��)��ͬ���ٶ�����(du��)׃�l�{(di��o)��ϵ�y(t��ng)�����^�͵�����l�ʣ��Ķ��pС�_(k��i)�P(gu��n)�l�ʺ��F�ġ����ͨ�^(gu��)��(sh��)�(y��n)�(y��n)�C������ķ����������׃�O�^(gu��)���У�������D(zhu��n)���^(gu��)��ƽ��(w��n)��——Փ�����ߣ���ҏ�(qi��ng) �� �� ������ ���Ʒ�
���������īI(xi��n)
����[1] Swamy M M, Kume T J, Maemura A, et al. Extended high-speed operation via electronic winding change method for AC motor[J]. IEEE Trans. on Industry Applications, 2006, 42(3): 742-752.
����[2] Levi E, Jones M, Vokosavic S N, et al. A novel concept of a multiphase, multimotor vector controlled drive system supplied from a single voltage source inverter[J]. IEEE Transactions on Power Electronics, 2004, 19(2): 320-335.
����[3] Kume T, Swamy M, Sawamura M, et al. A quick transition electronic winding changeover technique for extended speed ranges[C]. Proceedings of IEEE Power Electronics Specialist, Aachen, Germany, 2004: 3384-3389.
����[4] �X�_�^. һ�N�µĽ���늙C(j��)�Q��׃�O��-2/3 ׃�O[J]. �Ї�(gu��)늙C(j��)���̌W(xu��)��(b��o), 2004, 24(3): 120-125. Qian Luofen. A new commutating method for change pole to electric machine 2/3 change-pole[J]. Proceedings of the CSEE, 2004, 24(3): 120-125.
����[5] Osama M, Lipo T A. A new inverter control scheme for induction motor drives requiring wide speed range[J]. IEEE Transactions on Industry Applications, 1996, 32(4): 938-944.
����[6] Hartman M T. The application of fortescue’s transformation to describe power states in multi-phase circuits with non-sinusoidal voltage and currents[C]. Proceedings of Electrical Power Quality and Utilisation, Barcelona, Spain, 2007: 1-5.
����[7] Kelly J W, Strangas E G. Torque control during pole-changing transition of a 3: 1 pole induction machine[C]. Proceedings of Electrical Machines and Systems, Seoul, Korea, 2007: 1723-1728.
����[8] Lyra R O C, Lipo T A. Torque density improvement in a six-phase induction motor with third harmonic current injection[J]. IEEE Transactions on Industry Applications, 2002, 38(5): 1351-1360.
����[9] Fuchs E F, Myat M H. Speed and torque range increases of electric drives through compensation of flux weakening[C]. Proceedings of Power Electronics Electrical Drives Automation and Motion, 2010: 1569-1574.
����[10] ��ҏ�(qi��ng), �S�M(j��n), ����. ����Б�(y��ng)늙C(j��)�����׃�O���g(sh��)[J]. 늙C(j��)�c���ƌW(xu��)��(b��o), 2009, 13(3): 322-326. Yang Jiaqiang, Huang Jin, Kang Min. Electronic pole change technique of multi-phase induction motor[J]. Electric Machines and Control, 2009, 13(3): 322-326.
����[11] Huang Jin, Kang Min, Yang Jiaqiang, et al. Multiphase machine theory and its applitions[C]. Proceedings of Electrical Machines and Systems, 2008: 1-7.
����[12] �S�M(j��n), ����, ��ҏ�(qi��ng). ���͆��@�M�����o(w��)�S��늙C(j��) [J]. �㽭��W(xu��)�W(xu��)��(b��o)(���W(xu��)��), 2007, 41(11): 1850-1856. Huang Jin, Kang Min, Yang Jiaqiang. Analysis of a new 5-phase bearingless induction motor[J]. Journal of Zhejiang University (Engineering Science), 2007, 41(11): 1850-1856.