�l���r�g��2021-12-29���ٷ��늹��QՓ���g�[��1��
ժ Ҫ�� ժҪ���S���L늴�Ҏģ���W�����ϵ�y��u�lչ��͑T��ϵ�y���V���ƏV�L늙C�M�D�ӑT�Կ��Ƽ��g�������ϵ�y���l�ʷ����Ծ�����Ҫ���x������ͨ�^���p���L늙C�M�ͻ�늙C�M�{�l���Եķ����Լ����p���L늙C�M��Ч�T�Գ������о���������L-��ϵ�yģ�����m��̓�M�T�����Ʋ�
����ժҪ���S���L늴�Ҏģ���W�����ϵ�y��u�lչ��͑T��ϵ�y���V���ƏV�L늙C�M�D�ӑT�Կ��Ƽ��g�������ϵ�y���l�ʷ����Ծ�����Ҫ���x������ͨ�^���p���L늙C�M�ͻ�늙C�M�{�l���Եķ����Լ����p���L늙C�M��Ч�T�Գ������о���������L-��ϵ�yģ�����m��̓�M�T�����Ʋ��ԡ����ȸ����L늙C�M�\�й��r��ϵ�y�L늝B��ģ���ӑB�Q�߳����L늈��{�l����ϵ������λ����L늙C�M�o���T�Կ�����ϵ���c�L늙C�M��Ч�T���������Pϵ���L��������ϵ�yģ���������L늙C�M̓�M�T�Կ��ƅ�����׃������������OӋ������C���������m���{�l���Ʋ��Ե���Ч�ԡ�����Y������ԓ���Բ��Hʹ���L늙C�M�ڸ��N�\�й��r�¾��܉��ṩ�ɿ����й�֧�Σ�߀���C���{�l�^�����L늙C�M�ķ����\�У������ϵ�y���l�ʷ����ԡ�
�����P�I�~���͑T��ϵ�y;�p���L늙C�M;��Ч�T������;ģ������;���m��̓�M�T��
����0 ����
������������S��“�ɂ����”���Ե��ƏV��ʩ��ϵ�y���L늝B�ʲ������[1]��Ȼ����Ҏģ�L늵Ľ��댢���@�������ϵ�y�Ŀ��_���������{�l����[2-3]�������������ߝB�L�ϵ�y�ĵ͑T�����ԣ����������°l����늾W���t��Ҫ�W�L늙C�M�܉��Ѕ��cϵ�y�{�l�͂��õ�����[4]��
����Ŀǰ��������W�ߌ��L늙C�M���c�{�l�Ŀ��Ʋ����M���˴������о����L늙C�M���{�l���ƣ���Ҫͨ�^���ø��ӿ��ƽY����׃��������ģ�K���й�ݔ����푑�ϵ�y�l��׃��[5]�����w���F���������D�ӑT�Կ���[6-8]�����ʂ��ÿ���[8-9]�;C�υf�{����[10-11]�Լ�������̓�Mͬ���C���g[12]�ȣ��L늙C�M���܉���Ч�ą��cϵ�y�{�l�����У��L늙C�M���D�ӑT�Կ�����ͨ�^�{���L늙C�M���D���D����ጷų����D���܁팍�F�ģ����܉���ٵ��ṩ�T��֧��������ϵ�y�l�ʐ���������Ч����ϵ�y�{�l���ܵ�ͬ�r���^�õĽ�����[13-14]������ʹ�L늙C�M���D�ӑT�Կ����܉��m��늾W�\�Р�B���īI[15-16] ����ϵ�y�l��׃����r����˸�ۙϵ�y�l�ʠ�B�ӑB�{���T�Կ��ƅ������{�l���ԣ��O����ھ����L늵��{�l������������늾W�l�����ԡ�ͬ�r���L�C�D���еĄ������ޣ���һζ���L늙C�M���cϵ�y�{�l��������ϵ�y���׳��F�l�ʵĶ��ε����¼������ڴˣ��īI[16-18]�����L�C��̎�h���������\�Зl�������׃�������Ʒ�����ʹ���L늙C�M�܉��ą��c�{�l��������ϵ�y�l�ʵĶ��ε��䣬������ϵ�y���l��푑�������Ȼ���@Щ���Ʒ����^�鷱�����y���m�����̑��ã��қ]�п��]�L늙C�M���Ʊ����ķ����ԡ�
����ᘌ��L����ϵ�y�ąf�{�{�l���ƣ����L���{�Ȍӣ�������Ҫ��Q�����L늈���Ҫ�֓��Ĺ���ȱ�~�������īI[16]���L�ٷօ^����A���Mһ������ģ��߉���Ʒ������F���L늈��c����ϵ�y���`����ϣ����r�Q�����L늈��Ķ����l��푑��й������������ϵ�y�l�ʷ�����;�īI[19]�t�����L늙C�M�օ^���ڴ_���L늈��ͻ�늙C�M���c�{�l�Ĺ��ʅ���ֵ�Ļ��A�ϣ��M�����L늈��{�l�����M���˄ӑB���䡣Ȼ���������īI�������L늝B�ʲ�׃�Ĉ��������M�е��о������]�п��]��ͬ�L늝B�ʹ��r���{�l���Ʒ������m���ԡ�
�����C�������������ڶ�λ�����L늡�����{�l���ԵĻ��A�ϣ�̽���m���ڲ�ͬ�L늝B�ʹ��r�µ�ģ�����m��̓�M�T�����Ʒ��������L���{�Ȍӣ�����ģ�����Ƹ����L늙C�M�\�й��r���L늝B������ӑB�Q���L늈��{�l����ϵ����ģ�����Ʋ���;���L늙C�M�ӣ������L�C��Ч���D����Ӌ��ó��L늙C�M�ĵ�Ч�T�Գ�������������Ч�T�Գ����c�D���D�ٵ��Pϵ�����ڑT�Կ�����ϵ���c��Ч�T�Գ������Pϵ���L��������ϵ�yģ������L늙C�M��ģ��̓�M�T�����Ʒ���������Y����ʾ���������Ч������ϵ�y���l�ʷ����ԣ������ϵ�y�\�еİ�ȫ������
����1 �L늙C�M̓�M�T������
����1.1 �L���{�l���Ա���
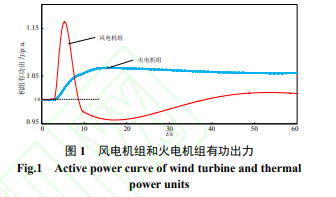
�����о����ߝB�L�ϵ�y���{�l���ƣ�����Ҫ��������λ�L늙C�M�c��늙C�M���c�{�l���{�l���Ժ��{�l�΄ա�Ŀǰ���p���L늙C�M (doubly- fed induction generator, DFIG) ���L늈��������C�ͣ���˱����� DFIG �����о�����DFIG ����ȡֵҊ�īI[6]�����⣬��ʹ DFIG �܉���F���^������̓�M�T�������������L��׃���� MPPT �\���������֞����īI[20]��ʾ���Ă��^�g�����]�� DFIG ���Ă��^�g���\�����ԣ����ăH�о��\���� MPPT �^�g�� DFIG ���L-��ϵ�y��ģ��̓�M�T�����ơ��D 1 ������ϵ�y�l���l�ʵ���r�L늙C�M�ͻ�늙C�M���й�����������
�����ɈD 1 ��֪�������L늙C�M�ǽ��������������W�����ģ���늾W���F���^С�đT�ԕr�g������������܉����l�ʔ_�ӵij�ʼѸ���ṩ�^����й�֧�Σ������m�r�g�^�̣��ڱ�ϵ�y�ЃH�s�� 4s�������l�ʻ֏��^���Е������~����{�l�����®�ϵ�y���L늳���ռ���^�ߕr���׳��F�^���صĶ����l���F��[14]������늙C�M�����^��đT�ԕr�g�������mȻ���ܿ�������ϵ�y�l��׃���������܉����^�L���ڵ��{�l�^���оS�ַ����ij��������C��ϵ�y�l�ʵķ�����
�����C���������څ��cϵ�y�{�l�^���У�������ְl�]�L늈��{�l�����Ժͻ�늙C�M�{�l���m�Ե����c������քe������١����B�ͳ־á��������й��Դ��ͬ�r��ע���ϵ�y���L늝B���^�ߕr���������F���صĶ����l���F�����l�ʻ֏��A�Α��M������ϵ�y�ĵ�Ч�T�Ժ��������ã��Լ���ϵ�y�l�ʵĻ֏͡�
����2 ���� DFIG ��Ч���ܵ��L-��ϵ�yģ��̓�M�T������
����2.1 DFIG ������
�����C�Ͽ��]�L늙C�M�{�lǰ����������ԣ�DFIG ��Ч���ܵ�׃�������ɲ���[18]����D 2 ��ʾ����Ч���ܵ�׃���ܙC�M�D��׃�������s����DFIG ��Ч���ܿ������L늙C�M��Ч̓�M�T�Գ��� Hwvir ��ʾ����ʽ(4)��ʾ��ʽ��׃�����xҊ�īI[18]��
����2.2 �L-��ϵ�yģ��̓�M�T������
������������L-��ϵ�y���{�l���ܣ����������L늈��\�Зl���Լ��l�ʠ�B�_����ϵ�y���й����������F���L늡���늙C�M�{�l���Ե��`����ϡ�
����2.2.1 �L���{�Ȍӿ��Ʋ���
�������������L늈����{�l�������m����ͬ�L늝B�ʣ����L���{�Ȍӣ�����ģ��߉������ FIS1 �_���L늈����{�l����ϵ�� Kw�����w���ƽY����D 2 ��ʾ������ FIS1����ݔ�������L늝B�� w (0.02~1)�c�L�YԴ�l�� (���ص�ƽ���L��) Vw(6~10m/s)��ݔ�������L늈����{�l����ϵ�� Kw(0~1)�����c�L늈��{�l�����ď����������P�ġ� FIS1 ������ǰϵ�y�\�й��r�²��W�L늙C�M���c�{�l��������ӑB�_�� Kw���M���Q����ϵ�y�l��푑��^�����L늈��Г��ij�����������ʽ(2)��ʾ��
�����_�� FIS1 ��ݔ���cݔ��׃�������Pϵ���`�ٶȺ��������總� A �D A2 ��ʾ��FIS1 �ڳ�������L늈��{�l������ͬ�r�����ˌ��L늈��{�l����ه�����C��ϵ�y�l�ʵķ����ԡ����ڴ˽�������� 1 ��ʾ��ģ��߉Ҏ�t����ԓҎ�t���w�F������������ԭ�t�����L�� Vw �dz�С���L늝B�� w �^С�r���tݔ�� KwҪ�M����С;���L�� Vw �^С���L늝B�� w �^��r���tݔ�� Kw �^��;���L�� Vw �^�����L늝B�� w �^С�r���tݔ�� Kw �^��;���L�� Vw �^�����L늝B�� w �^��r���tݔ�� Kw �dz��C�ϵõ���ģ��߉ϵ�y���� Mamdani �͵�ģ������ݔ���Y����D 4 ��ʾ��
����2.2.2 �C�M�ӿ��Ʋ���
���������������L늙C�M�ӵ�ģ��̓�M�T�����Ʋ��ԣ����]���L늙C�M���ƅ����Č��r��׃���܌�ϵ�y���w�����Ԯa��Ӱ�[15,21]��ᘌ��\���� MPPT �^�g�� DFIG �����D 5 ��ʾ���L��������ϵ�yģ�ͣ����������ƅ����ĺ���׃��������ģ���г�ʼ������ȡֵҊ��� A �� A1�����~���L������ (Vw=9m/s)���O���T�Կ��ƅ��� Kdf �� Kpf ���� 1�������׃����ϵ�� Kdfp �� Kpfp ��ȡֵ���M���l������ֵ�������L�Ƴ�Ӱ�ϵ�y�������Ե��������������Ƅ�܉�E��D 6 ��ʾ��
�������D 6 �M�з�����֪���� Kpfp �^С�r��������1 �����F��ֵ����ʽ(3)��֪�@����� Kpfp �Ĵ�С�cϵ�y�������P��Kpfp �^С���pСϵ�y���ᣬ����ϵ�y�����Բ��ѣ��� Kpfp ����r������1 �����ƽ���Ƅӣ�ϵ�y�����Եõ�����;�� Kpfp�^��r��������2 ���pСֱ���Ƅӵ��Ұ�ƽ�棬�@������ Kpfp �^��������L늙C�M���Ʊ�����ʧ����ͬ��������֪��������3 ��4 ��׃������ͬ�ӕ����� Kdfp ��׃���������ɴ˿ɵã���ϵ�� Kpfp ȡֵ������(- 7~19);��ϵ�� Kdfp ��ȡֵ������(-9~11)����ˣ�������ȡֵ�������Ӽ�����̓�M�T�����ƅ�����׃�������܉�ϵ�y�����Բ���Ӱ푡�
�������_������ϵ�y�l�ʲ��Ӡ�B�ӑB�{��ϵ�y��Ч�T���������ұ����L늙C�M���Ʒ����Ե�Ҫ��[15,18]�����Ļ��ڑT�Կ���ϵ�� Kdf �c��Ч�T�Գ��� Hwvir ���Pϵ���L��������ϵ�yģ������L늙C�M��ģ��̓�M�T�����ƣ����ƽY����D 7 ��ʾ��
������D 7 ��ʾ���ڙC�M���ƌӣ������L늙C�Mģ��߉������ FIS2 �ӑB�{���T�Կ��ƅ������Ը�׃ϵ�y��Ч�T�������ᡣ���� FIS2��ȡϵ�y�l��ƫ��f ( - 0.005~0 p.u.) �� �l �� ׃ �� �� d dt f ( - 0.012~0.012 p.u./s)[22]��ݔ��������Ч�^��ϵ�y�l�ʲ��Ӡ�B��ݔ������T�Կ�����ϵ�� Kdf (0~1) ������ϵ�� Kpf (-6~6)��FIS2 ��ݔ���cݔ���������Pϵ���`�ٶȺ��������總� A �D A3 ��ʾ��
����FIS2 ����ϵ�y�l��׃�����r�{���L늙C�M���й�ݔ�����ӑBģ�Mͬ���l늙C�Ĺ��l�´��͑T��푑����ԣ���Ч�a�����L��ϵ�y�ĵ�Ч�T�������ᣬ���ڴ˽�������� 2 ��ʾ��߉Ҏ�t����
����FIS2 �w�F������ԭ�t�飺��ϵ�y�l��ƫ��f �^С��ϵ�y�l��׃���� d dt f �^��ֵ�^С�r���tݔ�� KdfҪ�M����С��Kpf ��ֵؓ�ҽ^��ֵ�M���ܴ�;��ϵ�y�l��ƫ��f �^����ϵ�y�l��׃���� d dt f ����ֵ�r��ݔ������ Kdf Ҫ�M����С��Kpf ��ֵؓ�ҽ^��ֵ�M���ܴ�ʹ��ϵ�y�l�ʱM��֏ͷ���;��ϵ�y�l��ƫ��f �^����ϵ�y�l��׃���� d dt f ��ֵؓ�r��ݔ������ Kdf Ҫ�M���ܴ�Kpf����ֵ�ҽ^��ֵ�M���ܴ��ԜpСϵ�y�l�ʲ��ӡ��C�ϵõ���ϵ�y���� Mamdani �͵�ݔ���Y����D 8 ��ʾ��
����3 ��������
��������C���������L-��ϵ�yģ��̓�M�T�����Ƶ���Ч�Ժ��L늙C�M�����m������Ч����������� B �D B1 ��ʾ�ăɅ^��ϵ�yģ�͡��^����� 9 �_��늙C�M���ɣ����_�C�M�~���й��� 300MW�����ЙC�M��������� A �� A1 ȡֵ���^�����L늈������ÆΙC��ֵģ�ͣ��b�C������ 400MW���L�C���\���� MPPT �^�g��ؓ�����ĵ��~������ PL �� 1600MW��ͨ�^�O��ؓ��ͻ������ģ�M�l�ʵ����¼��������Ա������D���ò�׃���M���L�������ȱ����ÓQ����׃ϵ�y���L�ռ�� w ��������C�Ŀ������
����1)�S��ϵ�y�L늝B�ʲ�׃�����^������L늙C�M���L���M�зֽM���O���l��һ���Ĺ��ʔ_�ӣ���C����f�{�{�l���ԵĿ����ԣ�У���L늙C�M�Ŀ���Ч����
����2)�ڲ�ͬ�L늝B�ʹ��r�£��^������L늙C�M���\���L����ͬ���O���l��ͬ�ӵĹ��ʔ_�ӣ�У��ϵ�y���{�l���ܣ���C����ģ���f�{���Ե������ԡ�
����3.1 ͬһ�L늝B�ʹ��r��ϵ�y�{�lЧ������
�����O��ϵ�y�L늝B�� w �� 25%�������\���L�٣����^������L늙C�M��ÿ�g�� 1m/s ԭ�t�ĸߵ��ͷ֞� 4 ���L�ٶ�(R1~R4)��ÿ���L�ٶεęC�M�����;��� 100MW������ t=2s �r��ϵ�yؓ��ͻȻ���� 22MW������Y����D 9 ��ʾ��
������D 9(a)��ʾ����ϵ�y�l�����ʔ_�Ӻ��L늈����c�{�lʹ��ϵ�y�l�����ƫ��pС���l�ʻ؏�����ֵ�ij��m�r�g���L�������L늈������c�{�l���L늈����īI[9, 15]���õ��D�ӑT�Կ����M���{�l�����������{�l���Ʋ����܉�ʹϵ�y�l�����M�����Ҫ���±0.2Hz ���l�ʲ��ӷ�����ϵ�y���l��푑�������ѡ�
�����D 9(b)�o���˔_�Ӱl����ϵ�y�л�늡��L늙C�M������׃��څ�ݡ��ɈD���Եó����ڱ��������{�l���Ʋ����£��L늙C�M�܉���ٵ����l�й�ݔ�����a���˻�늙C�M�й�֧�ε��ӕr��;���⣬�Y�ψD 9(a)������֪���L늙C�M�D�ٻ֏͕r���~���й�������ϵ�y�l�ʵĻ؏��ٶȣ��@�f���L늙C�M�o���{�l�������L�l�ʻ؏͕r�g����r�ġ�
�����D 9(c)�o�� FIS2 ǰ 40s �ķ���Y�����ɈD��֪���ڲ�ͬ�l��׃���A�Σ��L늙C�Mģ���T�Կ��ƅ����Dz���׃���ġ��Y�ψD 9(a)���������l�ʃɴ��½����g�����ƅ��� Kdf �� Kpf�Ŀ���������Ч������ϵ�y�l�ʵĐ����ͼ�����ϵ�y�l�ʵĻ֏͡����⣬ݔ�����ƅ����������з�ֵС�ҳ��m�r�g�̵ě_�����}�ӣ���������ԓ��}���ǿɺ��Եġ�
����ᘌ���������f�{�{�l���Ʋ��ԣ����څ^��� ���L늙C�M��̎�L�ٶβ�ͬ��������l��֧�����gÿ���L�ٶ��L늙C�M���й��������D��׃����rҲ������ͬ�����w׃����r��D 10 ��ʾ��
�������D 10 ������֪��ÿ���L�ٶε��L늙C�M���l�ʲ������g���܉��ṩ����֧�Σ������S���L�ٶεȼ�����ߣ��L늙C�M�̕r�й�ֵ��u�������� 1.036p.u.;�й�֧��(�й������� 1.0p.u.����) �r�gҲ��u���ӣ����L�� 5.9s�����L늙C�M�̕rጷŵĄ�����u����;ͬ�r�L늙C�M���D��׃������Ҳ��u�������� 0.003p.u.��
�����Mһ�����D 9(a)�͈D 10(b)�M�з������L늙C�M�D�ٻ֏͵�ͬ�r��ϵ�y�l���������°�څ�ݣ����ܿ������»֏ͣ��@�����C�M�ӿ��Ʋ����� 2Hwmax ����T�Կ�����ϵ�� Kdf �����ȡֵ�������ϵ�y��Ч�T����ͬ�r�ֱ����ˌ��L늙C�M���^����ه�����C�˙C�M���\�з���;ͬ�r���Եó����ڲ�ͬ�L�ٶε��L늙C�M���F�������T���Dz�ͬ�ģ�����L늙C�M�������M���D�ٻ֏��A�εģ���һ���̶��������˶����l���ď��ȡ�——Փ�����ߣ�ʢ���壬������������������ïɭ
SCISSCIAHCI