�l(f��)���r(sh��)�g��2022-03-26���ٷ���Ƽ�Փ���g�[��1��
ժ Ҫ�� ժ Ҫ: ����܉����ͨϵ�y(t��ng)��Ҫ�ɹ�/�W(w��ng)ϵ�y(t��ng)��܉����·��܇�v��܇վ�ȽM��,���y(t��ng)���˹�Ѳ�z�ȷ����z�y(c��)Ч�ʵ͡��ڄ�(d��ng)��(qi��ng)�ȴ��Ԅ�(d��ng)�������ܻ��̶Ȳ���,�o����܉����ͨ���\(y��n)�I(y��ng)���Ϻ��M(j��n)һ�������l(f��)չ����(l��i)�˾������(zh��n). �C(j��)��ҕ�X(ju��)����һ�N��Ҫ�ęz�y(c��)�ֶ�,�ڳ���܉����ͨϵ�y(t��ng)��B(t��i)�z�y(c��)
����ժ Ҫ: ����܉����ͨϵ�y(t��ng)��Ҫ�ɹ�/�W(w��ng)ϵ�y(t��ng)��܉����·��܇�v��܇վ�ȽM��,���y(t��ng)���˹�Ѳ�z�ȷ����z�y(c��)Ч�ʵ͡��ڄ�(d��ng)��(qi��ng)�ȴ��Ԅ�(d��ng)�������ܻ��̶Ȳ���,�o����܉����ͨ���\(y��n)�I(y��ng)���Ϻ��M(j��n)һ�������l(f��)չ����(l��i)�˾������(zh��n). �C(j��)��ҕ�X(ju��)����һ�N��Ҫ�ęz�y(c��)�ֶ�,�ڳ���܉����ͨϵ�y(t��ng)��B(t��i)�z�y(c��)�I(l��ng)��õ��ˏV���đ�(y��ng)��. �b�ڴ�,ᘌ�(du��)�C(j��)��ҕ�X(ju��)�ڳ���܉����ͨϵ�y(t��ng)��ȫ��B(t��i)�z�y(c��)�е��о��͑�(y��ng)���M(j��n)�оC��. ����,��(ji��n)Ҫ��B����܉����ͨ�Ļ�������Ϳ��ٰl(f��)չ�����R������(zh��n)�c�C(j��)��. Ȼ��,Ԕ��(x��)��B�C(j��)��ҕ�X(ju��)���g(sh��)�ڳ���܉����ͨ����ϵ�y(t��ng)��ȫ��B(t��i)�z�y(c��)�е��о��c��(y��ng)����r;ᘌ�(du��)��/�W(w��ng)ϵ�y(t��ng)��B(t��i)�z�y(c��)��(w��n)�},�քe���c(di��n)��B�C(j��)��ҕ�X(ju��)����늹�ĥ�ęz�y(c��)����늹����j(lu��)�������������z�y(c��)�����|�W(w��ng)�΅���(sh��)�z�y(c��)�����|�W(w��ng)ĥ�ęz�y(c��)�Լ����|�W(w��ng)�Ғ첡���z�y(c��)�еć�(gu��)��(n��i)���о��F(xi��n)��;��܉����·��ȫ��B(t��i)�z�y(c��)����,�քe��B�C(j��)��ҕ�X(ju��)�ڿۼ���ȫ��B(t��i)�z�y(c��)���܉���没���z�y(c��)�еđ�(y��ng)���c�о��F(xi��n)��;�IJ�ͬ�z�y(c��)�(xi��ng)�c(di��n)�Ƕ�Ԕ��(x��)��B�C(j��)��ҕ�X(ju��)��܇�v��B(t��i)�z�y(c��)�еđ�(y��ng)���c�о��M(j��n)չ;�����Ϳ��Y(ji��)�C(j��)��ҕ�X(ju��)��܇վ늷��ݰ�ȫ�O(ji��n)�غ�վ�_(t��i)��ȫ�O(ji��n)�صĮ����О�z�y(c��)�еľ��w��(y��ng)�ú��о�;�����c(di��n)��B�C(j��)��ҕ�X(ju��)��܉����ͨ˾�C(j��)�О�O(ji��n)�y(c��)�еľ��w��(y��ng)�úͱ������g(sh��). ���,��(du��)�C(j��)��ҕ�X(ju��)���g(sh��)��(y��ng)���ڳ���܉����ͨϵ�y(t��ng)��B(t��i)�z�y(c��)�I(l��ng)���δ��(l��i)�M(j��n)��չ��.
�����P(gu��n)�I�~: ����܉����ͨ;��ȫ��B(t��i)�z�y(c��);���ܻ�;�\(y��n)�I(y��ng)����;�C(j��)��ҕ�X(ju��)
����0 �� ��
����܉����ͨ�Ǽ������I(y��)����N��һ���ď�(f��)�sϵ�y(t��ng),ͨ����܉����·��܇վ��܇�v����/ �W(w��ng)ϵ�y(t��ng)��ͨ����̖(h��o)ϵ�y(t��ng)�ȽM��,����ӑՓ��܉����ͨ��Ҫָ����܉����ͨ. ��Ҋ(ji��n)��܉����ͨ�Ђ��y(t��ng)�F·(������(gu��)���F·�����H�F·�������F·)�����F���p܉����܉�܇. �����c�����܉����ͨ��ͬ����,���F�����ڳ����е�һ�N���١����\(y��n)���������������܉����ͨ[1] . Ŀǰ, �S���҇�(gu��)���л��M(j��n)���ӿ�,����Ҏ(gu��)ģ�����U(ku��)��, �����˿���������,��������(d��ng)�˿��_ʼӿ�����,������еĽ�ͨ�������L(zh��ng),܉����ͨ�����䷽�㡢��ݡ��h(hu��n)�����d�Ͷ�����c(di��n)�яV����(y��ng)���ڽ�Q�҇�(gu��)һЩ����еĽ�ͨ��(w��n)�}. ܉����ͨ������Ƴ��н�ͨ�h(hu��n)������Ҫ��ͨ����,�佨�O(sh��)�Ǻ������н�(j��ng)��(j��)�l(f��)չˮƽ����Ҫ��(bi��o)�R(sh��)֮һ[2] .
���������(l��i),�����ڸ����I(l��ng)�����P(gu��n)�ƌW(xu��)���g(sh��)�IJ����M(j��n)��,����܉����ͨҲ�õ����w�ٰl(f��)չ,��u�ɞ���������Ҫ����ͨ�\(y��n)ݔ��ʽ. ��(j��)�y(t��ng)Ӌ(j��)[3] ,����2019���, �Ї�(gu��)��ꑵ^(q��)����40��(g��)�����_ͨ܉����ͨ�\(y��n)�I(y��ng)��· 208 �l, �\(y��n)�I(y��ng)��·���L(zh��ng)�� 6 736.2 km. ����, ���F�\(y��n)�I(y��ng)��·5 180.6 km,ռ��76.9 %. ��(d��ng)�������\(y��n)�I(y��ng)��·�L(zh��ng)��974.8 km. ����, 2019��ȫ����Ӌ(j��)��ɿ��\(y��n)��237.1 �|�˴�,ͬ�����L(zh��ng)12.5 %;���M(j��n)վ����149.4�|�˴�,ͬ�����L(zh��ng)12.2 %;�����\(y��n)���D(zhu��n)����2 003.1�|��km,ͬ�����L(zh��ng)13.8 %,�\(y��n)�I(y��ng)Ҏ(gu��)ģ�^�m(x��)���ָ����L(zh��ng)��(sh��)�^. ��2019 ��Ľy(t��ng)Ӌ(j��)��(sh��)��(j��)���y����,܉����ͨ�İl(f��)չ�dz�Ѹ��, ����“��ͨ��(qi��ng)��(gu��)”“���ͳ��(zh��n)��”�Ȱl(f��)չ��(zh��n)����,��(gu��)��Ҳ��Ͷ�������Y��,�ڸ���ij���Ҏ(gu��)���ͽ��O(sh��)܉����ͨ���W(w��ng).
����Ȼ��,�S��܉����ͨ�Ŀ��ٰl(f��)չ,��(du��)��܉����ͨ���\(y��n)ݔ��ȫ�;S���Q��Ҳ����˸��Ӈ�(y��n)����Ҫ��. ܉����ͨϵ�y(t��ng)�ɶ���(g��)���ֽM��,ÿ��(g��)���ֵİ�ȫ����Ӱ�����(g��)ϵ�y(t��ng)���\(y��n)�I(y��ng)��ȫ. ��܉����·,����܉����ͨ����(g��)ϵ�y(t��ng)��������,�䰲ȫ��B(t��i)�ĺÉ�ֱ��Ӱ����\(y��n)�I(y��ng)܇�v����������^(gu��)���е�ƽ��(w��n)�ԺͰ�ȫ��,ͬ�r(sh��)Ҳ��(hu��)Ӱ푳˿ͳ����r(sh��)�����m��. ��(d��ng)܉����·�O(sh��)����F(xi��n)�����Ҳ���l(f��)չ����,Ҳ�����Ӿ�·�S���B(y��ng)�o(h��)�ijɱ��;S���Q�ߵ��y��[4] . ����,�繭 / �W(w��ng)ϵ�y(t��ng),���(d��n)ؓ(f��)���������W(w��ng)���ݔ�ͽo�\(y��n)�I(y��ng)��܇�vʹ�õ���Ҫ�΄�(w��), �@һ�^(gu��)�����������κή������߲����](m��i)�м��r(sh��)�l(f��)�F(xi��n)���M(j��n)��̎��,�t�п��܌�(d��o)��(y��n)�صĹ���,��(y��n)��Ӱ��\(y��n)�I(y��ng)܇�v�İ�ȫ�\(y��n)��,���� / �W(w��ng)�����Լ��M(j��n)һ������Ĺ� / �W(w��ng)���P(gu��n)�����ѽ�(j��ng)�ɞ�܉����ͨ�¹�������Ҫ���¹�ԭ��֮һ,����ϵ�y(t��ng)���ϼsռ���¹ʔ�(sh��)������֮һ,���և�(y��n)�ص�����������_(d��)��40 %����[5] . ���,��(du��)��܉����ͨ��ȫ��B(t��i)�ļ��r(sh��)�Ҿ���(zh��n)�z�y(c��),��(y��u)���S����,����܉����ͨ��Ч�����¹ʵİ�ȫ�\(y��n)�I(y��ng),�M(j��n)һ�����M(j��n)�҇�(gu��)܉����ͨ�İl(f��)չ,�����ஔ(d��ng)��Ҫ�����x.
�����L(zh��ng)���ԁ�(l��i),��(du��)��܉����ͨ��ȫ��B(t��i)�ęz�y(c��)��Ҫ���˹�Ѳ�z�ķ�ʽ����,ԓ��ʽ�m��(ji��n)�����е��ڄ�(d��ng)��(qi��ng)�ȴ�,Ч�ʵ���,��(du��)Ѳ�z�ˆT�Č��I(y��)���|(zh��)Ҫ���^��,�z�y(c��)�Y(ji��)�����������^��Ӱ��^��,���HһЩ�z�y(c��)�����\(y��n)�I(y��ng)�մ��ڃ�(n��i)���,����߀����Σ����Ѳ�z���˵�������ȫ,�����y�ԝM���������L(zh��ng)���\(y��n)�I(y��ng)����[6] . ᘌ�(du��)�˹��z�y(c��)��ʽ���ڵ��T����(w��n)�},�ڿƌW(xu��)ˮƽ���Ԅ�(d��ng)�����g(sh��)����l(f��)չ�ͳ�����Ƅ�(d��ng)��,��N�ǽ��|ʽ�o(w��)�p�z�y(c��)������u���������(y��ng)����܉����ͨϵ�y(t��ng)��ȫ��B(t��i)�z�y(c��)�I(l��ng)��. �ǽ��|ʽ�o(w��)�p�z�y(c��)���g(sh��)��һ�N�����^���Ԅ�(d��ng)���̶Ⱥ͙z�y(c��)����[7] ,�ұ��ڲ����ĬF(xi��n)�����\�༼�g(sh��),��Ҫ���������z�y(c��)��늜u������©�řz�y(c��)���t��z�y(c��)������ȫϢ�z�y(c��)�ȷ���. ԓ���g(sh��)�ڙz�y(c��)�^(gu��)���Л](m��i)���Ɖ���,Ч���^��,�Ҳ��c���z�y(c��)Ŀ��(bi��o)���|,�܉��h(yu��n)���x��(sh��)�F(xi��n)��(du��)���y(c��)Ŀ��(bi��o)�ęz�y(c��). ������,�S���C(j��)��ҕ�X(ju��)���C(j��)���W(xu��)��(x��)����ȌW(xu��)��(x��)���˹��������I(l��ng)���g(sh��)��Ѹ�ٰl(f��)չ,���ڙC(j��)��ҕ�X(ju��)�ķǽ��|ʽ�z�y(c��)������u�l(f��)չ���첢�V����(y��ng)����늚⡢��ӡ��C(j��)е����܇�����I(y��)�z�y(c��)���I(l��ng)��,��Ŀǰ��鳣�õ�һ�N�z�y(c��)����[8] .
�����C(j��)��ҕ�X(ju��)���g(sh��)һ����ָʹ�÷ǽ��|ʽ��W(xu��)�O(sh��)��͂������Ԅ�(d��ng)���ղ�̎���挍(sh��)��(ch��ng)���ĈD���ԫ@���˂�����Ҫ����Ϣ[9] ,�����Դ�������M(j��n)�гߴ�y(c��)����ȱ�ݙz�y(c��)��Ŀ��(bi��o)�R(sh��)�e���C(j��)���ˌ�(d��o)����. ���I(y��)�ϵ��͵ęC(j��)��ҕ�X(ju��)ϵ�y(t��ng)��Ҫ�ɹ�W(xu��)����ģ�K(������Դ�����C(j��)���R�^)���D��@ȡģ�K(�D��ɼ���)����(sh��)�r(sh��)̎��ģ�K�͈�(zh��)��ģ�K�ȽM��[10] . ���^�ڂ��y(t��ng)���˹��z�y(c��)���g(sh��),���ڙC(j��)��ҕ�X(ju��)�ęz�y(c��)��ʽ���зǽ��|�ԡ���(sh��)�r(sh��)�ԡ��`���Ժ;��_�Ե����c(di��n),�m�����؏�(f��)�Ըߡ��h(hu��n)���l�������Լ��ǽ��|���ܜy(c��)���Ĉ�(ch��ng)��[11] . �S���C(j��)��ҕ�X(ju��)���g(sh��)���l(f��)չ,�����C(j��)��ҕ�X(ju��)�ă�(y��u)��(sh��)�����c(di��n)����Ч��Q���y(t��ng)�z�y(c��)��ʽ���ڵ��T����(w��n)�},ʹ����܉����ͨϵ�y(t��ng)��B(t��i)�z�y(c��)�I(l��ng)��õ���Խ��(l��i)Խ����P(gu��n)ע�͑�(y��ng)��. �c��ͬ�r(sh��),��θ��õ������ÙC(j��)��ҕ�X(ju��)���g(sh��)�Ļ��A(ch��)��,�Y(ji��)����ȌW(xu��)��(x��)���˹����ܵ����M(j��n)�ļ��g(sh��),��(sh��)�F(xi��n)�����Ԅ�(d��ng)�������ܻ���܉����ͨϵ�y(t��ng)��B(t��i)�z�y(c��),Ҳ�ɞ�������о��ğ��c(di��n)��(w��n)�},����Ҫ���о�?j��)r(ji��)ֵ.
�����b�ڴ�,����ᘌ�(du��)�C(j��)��ҕ�X(ju��)���g(sh��)��܉����ͨϵ�y(t��ng)��B(t��i)�z�y(c��)�е��о��͑�(y��ng)���M(j��n)��ȫ����ϵ�y(t��ng)�Ŀ��Y(ji��). Ԕ��(x��)��B�˙C(j��)��ҕ�X(ju��)���g(sh��)��܉����ͨ�еĹ� / �W(w��ng)ϵ�y(t��ng)��܉����·��܇�v��܇վ����ϵ�y(t��ng)�İ�ȫ��B(t��i)�z�y(c��)�еğ��c(di��n)��(y��ng)��,���������Y(ji��)�ˬF(xi��n)�и���ϵ�y(t��ng)�İ�ȫ��B(t��i)�z�y(c��)����. ��Y(ji��)��չ�����ڙC(j��)��ҕ�X(ju��)��܉����ͨϵ�y(t��ng)��B(t��i)�z�y(c��)Ŀǰ���ڵĆ�(w��n)�}�����о�څ��(sh��)�͑�(y��ng)��ǰ��.
����1 �C(j��)��ҕ�X(ju��)�ڹ�/�W(w��ng)ϵ�y(t��ng)��B(t��i)�z�y(c��)�еđ�(y��ng)��
������/ �W(w��ng)ϵ�y(t��ng)��܉����ͨ���ϵ�y(t��ng)�е��P(gu��n)�I�M�ɲ���,�䰲ȫ��B(t��i)�ĺÉ�ֱ��Ӱ����\(y��n)�I(y��ng)܇�v�������\(y��n)��. ���,����܇�\(y��n)���^(gu��)������Ҫ��(du��)�� / �W(w��ng)ϵ�y(t��ng)��B(t��i)��(sh��)�r(sh��)�M(j��n)�бO(ji��n)�y(c��),�l(f��)�F(xi��n)���ܴ��ڵĹ��ϲ����r(sh��)�ų��[��. ��/ �W(w��ng)ϵ�y(t��ng)�z�y(c��)Ŀǰ��Ҫ��ȡ4�N���g(sh��)�ֶ�,�����˹��z�y(c��)�����|ʽ�� / �W(w��ng)�z�y(c��)���ǽ��|ʽ�y(c��)�༼�g(sh��)�� / �W(w��ng)�z�y(c��)�Լ��ǽ��|ʽ�D��̎�����g(sh��)�� / �W(w��ng)�z�y(c��)[12] . ���ڙC(j��)��ҕ�X(ju��)�Ĺ��W(w��ng)�z�y(c��)�������3�N��������,�z�y(c��)�`���Ը�,��(zh��n)�_�ȸ�,�O(sh��)�����̶ܳȸ�,���Ҍ�(du��)������܇�ɔ_Ӱ�С,��˵õ���Խ��(l��i)Խ�V���đ�(y��ng)��.
������/ �W(w��ng)�ǽ��|ʽ�D��z�y(c��)��(sh��)�H�����������C(j��)�O(sh��)�䌦(du��)�� / �W(w��ng)�M(j��n)���h(yu��n)���x�D��ɼ�,��ͨ�^(gu��)Ӌ(j��)��C(j��)ҕ�X(ju��)���P(gu��n)���g(sh��)��(du��)�� / �W(w��ng)��B(t��i)�M(j��n)�з���,�Ԍ�(du��)���B(t��i)�M(j��n)�Йz�y(c��),���,�� / �W(w��ng)�O(ji��n)�y(c��)ϵ�y(t��ng)���O(sh��)Ӌ(j��)�c���Ʊ�ɞ�һ��(g��)���^�P(gu��n)�I�Ć�(w��n)�}. �� / �W(w��ng)ϵ�y(t��ng)�DZ��^��(f��)�s�ľC��ϵ�y(t��ng), ������늹��c���|�W(w��ng)֮�g������(du��)��(d��)���ăɂ�(g��)��ϵ�y(t��ng), ��늹����b�ڙC(j��)܇܇�v픲�(��D1��ʾ),���|�W(w��ng)���b�ڵ��F����픲����߲��������⾀·��(��D2��ʾ),�����늹��ͽ��|�W(w��ng)�ęz�y(c��)ϵ�y(t��ng)����������(du��)��(d��)����,����(ji��)�����@�ɂ�(g��)���ַքe��B�C(j��)��ҕ�X(ju��)���g(sh��)�ڹ�/ �W(w��ng)ϵ�y(t��ng)��B(t��i)�z�y(c��)�еđ�(y��ng)��.
����1.1 ��늹���B(t��i)�z�y(c��)
������늹��z�y(c��)ϵ�y(t��ng)�����ǰ��b�ڵ����ϵĶ��c(di��n)�O(sh��)��,��(d��ng)��܇�\(y��n)�н�(j��ng)�^(gu��)�z�y(c��)�b�Õr(sh��),�ɸ������C(j��)���O(sh��)��ɼ��õ���늹��D��,Ȼ�D����غ���M(j��n)һ����(du��)��늹���B(t��i)�M(j��n)�Йz�y(c��)�ͷ���. Ŀǰ,��(gu��)��(n��i)���ж�ҹ�˾���о�����������늹��O(ji��n)�y(c��)ϵ�y(t��ng)����,��Ӣ��(gu��) Ricardo Rail��˾��������ƌW(xu��)�о�Ժ(TUBITAK)���Ї�(gu��)��܇��������C(j��)܇����˾��[13-18] . ���īI(xi��n)[18] ����,һ��(g��)��������늹��O(ji��n)�y(c��)ϵ�y(t��ng)�����������ɂ�(g��)��ϵ�y(t��ng),���|�l(f��)ϵ�y(t��ng)���Ĕzϵ�y(t��ng)������ϵ�y(t��ng)����ݔϵ�y(t��ng)������̎��ϵ�y(t��ng)��. ��D3��ʾ,��(d��ng)��܇ͨ�^(gu��)�z�y(c��)�O(sh��)��r(sh��), �\(y��n)�����������������̽�y(c��)�����t�����x������l(f��)�������������C(j��)�O(ji��n)�y(c��)�Ͳɼ����W(w��ng)��Ҫ�Y(ji��)��(g��u)����(sh��)�Լ����W(w��ng)�D��,Ȼ���ں��_(t��i)�M(j��n)�з����͙z�y(c��). ��ͬ��λ���Ƶ�ϵ�y(t��ng)���O(sh��)��Ͳ�����ʽ�ϕ�(hu��)��һЩ�,��������ͬ. �ګ@ȡ����늹��D���,�P(gu��n)�I�Ć�(w��n)�}��������Ӌ(j��)��C(j��)ҕ�X(ju��)���g(sh��)��(du��)��늹���B(t��i)�M(j��n)���R(sh��)�e�ͷ���.
����1.1.1 ��늹�ĥ�ęz�y(c��)
�����ڇ�(gu��)��(n��i)����늹���B(t��i)�z�y(c��)���P(gu��n)���о���,ᘌ�(du��)��늹�����ĥ�IJ����ęz�y(c��)����(du��)�^��,����(j��)�����õľ��w�㷨��Ҫ�֞���ڂ��y(t��ng)�D��̎���ęz�y(c��)�����ͻ�����ȌW(xu��)��(x��)�ęz�y(c��)����.
�������ڂ��y(t��ng)�D��̎���ęz�y(c��)�����z�y(c��)���E����: ����ͨ�^(gu��)߅���z�y(c��)���㷨��(l��i)��ȡ��늹�����߅��ĥ������,Ȼ���ڴ˻��A(ch��)�Ϸ������u(p��ng)����늹�ĥ�ĵć�(y��n)�س̶�. �īI(xi��n)[19]������(du��)���˲�ͬ��߅���z�y(c��)����, ��K�ó�Canny߅���z�y(c��)���ӵ���ȡЧ�����. �īI(xi��n) [20]�����ˌ�(du��)�Q������ֵ�V����(SNN),��һ���̶����^(gu��)�V�������o(h��)�D��߅��. �īI(xi��n)[21-22]���Ȳ���ģ��C ��ֵ����㷨(FCM)��(du��)ԭʼ�D���M(j��n)�зָ�,��ȡ����늹���Ч�^(q��)��;Ȼ��ʹ��߅����ȡ��߅�����L(zh��ng)�����@ȡĥ��߅��,�����û�����(sh��)�W(xu��)�ΑB(t��i)�W(xu��)��߅�����L(zh��ng)���B��߅���Д��λ��,��K�õ���������늹�����߅��. �@�N��������늹�����ĥ���^���(y��n)��,������߅�������ݶ�ֵ�^�����r�z�y(c��)Ч���^������. ���īI(xi��n)[21]�Y(ji��)������,ԭʼ����늹�����D�����ȡ��ĥ��������D4��ʾ. ���ڂ��y(t��ng)�D��̎���ęz�y(c��)����˼�뺆(ji��n)��,���ڌ�(sh��)�F(xi��n),���㷨��(w��n)���Բ�,�����Բ���,�z�y(c��)���E�^����,������K�z�y(c��)�Y(ji��)�������ڻ���߅����������ȡ�Y(ji��)��.
���������(l��i),ᘌ�(du��)���y(t��ng)���ڈD��̎���ęz�y(c��)�������ڵIJ���,������ȌW(xu��)��(x��)���g(sh��)����늹�����ĥ�ęz�y(c��)�ͷ��������õ�Խ��(l��i)Խ����P(gu��n)ע,��u�ɞ��о����c(di��n). �īI(xi��n)[5]���ڽ�(j��ng)����e��(j��ng)�W(w��ng)�j(lu��),��(j��ng)�^(gu��)�Y(ji��)��(g��u)�{(di��o)��������(sh��)�{(di��o)��(y��u)�����PDDNet,��(j��ng)�^(gu��)Ӗ(x��n)�����܉��Գ��^(gu��) 90 %�Ĝ�(zh��n)�_�Ȍ�(sh��)�F(xi��n)��늹�����e�R(sh��)�e. �īI(xi��n)[23] ���īI(xi��n)[5]�Ļ��A(ch��)��,������ȌW(xu��)��(x��)�е�Ŀ��(bi��o)�z�y(c��)���g(sh��),��ʹ�û���Soft-NMS���M(j��n)��Faster R-CNN�W(w��ng)�j(lu��), �Ը��ߵĜ�(zh��n)�_����ԭʼ�D���Ќ�(sh��)�F(xi��n)��늹��^(q��)�����ȡ�Լ������R(sh��)�e[23] . ������ȌW(xu��)��(x��)�ķ�����Ȃ��y(t��ng)��������,���и��õķ���������������,�����������O(sh��)��Ӌ(j��)�������Լ�Ӗ(x��n)����(sh��)��(j��)���IJ���,�ڌ�(sh��)�H��·�еđ�(y��ng)��߀�д��M(j��n)һ���о�.
����1.1.2 ��늹����������z�y(c��)
�����ڌ�(sh��)�H܇�v�\(y��n)�I(y��ng)��·��, ���˻���ĥ����, ��늹�߀���ڰ��j(lu��)�������ľ�ƫ�ƺ����ȱʧ�Ȳ���, �@Щ�����Ĵ��ڶ���(hu��)��ͬ�̶ȵ�Ӱ�܇�v�\(y��n)�I(y��ng)�İ�ȫ[24-28] .
������늹����j(lu��)����ָ�\(y��n)�I(y��ng)܇�v������O(sh��)Ӌ(j��)�\(y��n)���ٶ�֮�r(sh��)��늹�����݆���ڴ�ֱ���������������(d��ng)��,�Լ�ˮƽ������������[��(d��ng)�����γɵİ��j(lu��)��[24] ,�z�y(c��)��늹����j(lu��)����(du��)�ڹ��W(w��ng)�O(sh��)�䰲�b���S�o(h��)�Լ���B(t��i)�z�y(c��)������Ҫ�����x. �īI(xi��n)[24-25]�O(sh��)Ӌ(j��)һ�N��늹����j(lu��)���z�y(c��)�b��,�ڸ߉��c�������h(hu��n)�����Ĕz��늹��D��,��������һ�N������؞�����ԙz�y(c��)�㷨��ģ��ƥ�䷨�ԫ@ȡ��늹��\(y��n)��λ��,�M(j��n)��Ӌ(j��)������(d��ng)�B(t��i)���j(lu��)���Y(ji��)��. ��(sh��)�(y��n)�Y(ji��)������,ԓ���������^�ߵľ��_��,�������^��(qi��ng),���z�y(c��)Ч����ه�ڌ�(du��)���z�y(c��)��늹�ģ��D����O(sh��)Ӌ(j��).
�������P(gu��n)֪�R(sh��)���]��Փ��Ͷ��ǰ��ô���؏�(f��)��
�����īI(xi��n)[26]���ö�N�D��̎���㷨�о�����늹����ľ�ƫ�ƙz�y(c��)�����ȱʧ�z�y(c��)����. ᘌ�(du��)���ľ�ƫ�ƙz�y(c��),����ͨ�^(gu��)Hough׃�Q�ȷ����z�y(c��)��Ӌ(j��)�㻬�������c(di��n),ͬ�r(sh��)�z�y(c��)���W(w��ng)���|�c(di��n)��λ��,Ȼ��Ӌ(j��)���ֵ�õ����ľ�ƫ��ֵ. ᘌ�(du��)��늹����ȱʧ�����ęz�y(c��),����ͨ�^(gu��)��(du��)�ȷ�����LjD��Ҷ������c��Ǡ�B(t��i)֮�g���P(gu��n)ϵ,������HOG�����������ӌ�(du��)��LjD���M(j��n)��������ȡ,Ȼ��ʹ��SVM (֧�������C(j��))��(du��)���������M(j��n)�ж����,�Ķ��ж��D��������Ƿ���ȱʧ. ����������ęz�y(c��)�㷨�P(gu��n)�I������늹����ĺ�������ĵĜ�(zh��n)�_��λ,�������д��M(j��n)һ������.
��������,ᘌ�(du��)��늹��Ѽy�����ęz�y(c��),�īI(xi��n)[27]��������׃�Q����Լ����������c(di��n),��(du��)��늹�����D���c(di��n)����ԺͷǾ��������M(j��n)�з��. �������ֽⷽ������ʹ���Ƅ�(d��ng)ƽ�д��ڲ�Ӌ(j��)�㴰������ֵ,����(j��)����ֵ�^(q��)�־���ƽ�нӿp�c����������ᔺκ۵������Ǿ��ԈD������,��K�@ȡ�����Ѽy��Ϣ; �īI(xi��n)[28]�ڻ��څ^(q��)�g����ģ���ص�߅���z�y(c��)�Y(ji��)���Ļ��A(ch��)��,����׃�Q������D��Ԫ���څ���(sh��)���g�������ֲ�,���һ�N���ژO�Ǽs��Hough׃�Q���Ѽy��ȡ����,ͨ�^(gu��)��Ч���ų����Ѽy�D��Ԫ�ص������c(di��n), ��K��(sh��)�F(xi��n)�����Ѽy���Ԅ�(d��ng)�z�y(c��). ���߾���(sh��)�F(xi��n)����늹������Ѽy�ķǽ��|ʽ�z�y(c��),�錍(sh��)�H���̑�(y��ng)���I(l��ng)���н�Q�����Ѽy�Ԅ�(d��ng)�z�y(c��)��(w��n)�}�ṩ���µ�˼·,���z�y(c��)���ȼ��ٶȶ�߀�o(w��)���_(d��)���F(xi��n)��(ch��ng)ʹ�õ�Ҫ��.
����1.2 ���|�W(w��ng)��B(t��i)�z�y(c��)
��������܉����ͨ���|�W(w��ng)��Ҫ����܉��܇�v�\(y��n)�I(y��ng)��·����,����(j��)���b���c(di��n)����ʽ��ͬ�ɷ֞鄂�Խ��|�W(w��ng)�����Խ��|�W(w��ng)���. ����,���Խ��|�W(w��ng)���b�ڵ��F����픶�,���Խ��|�W(w��ng)���b�ھ�·���Ե�֧����,��ˌ�(du��)�ڽ��|�W(w��ng)�ęz�y(c��)����늹��z�y(c��)��ͬ,����ʹ�ö��c(di��n)�O(sh��)��. Ŀǰ,���ڙC(j��)��ҕ�X(ju��)�Ľ��|�W(w��ng)��B(t��i)�z�y(c��)���������ð��b��܇�?sh��)ęz�y(c��)�O(sh��)��,��(sh��)�F(xi��n)����;�z�y(c��),Ҳ�в���ͨ�^(gu��)�z�y(c��)܇�����ֳ��O(sh��)���M(j��n)�Йz�y(c��)�ķ���,����(sh��)�H��(y��ng)��Ч������(du��)�^��[29] . ���|�W(w��ng)��B(t��i)�z�y(c��)ϵ�y(t��ng)����(j��)�z�y(c��)�(xi��ng)�c(di��n)�IJ�ͬ,����w�O(sh��)Ӌ(j��)����Ҳ��(hu��)�����^(q��)�e.
����1.2.1 ���|�W(w��ng)�΅���(sh��)�z�y(c��)
�������|�W(w��ng)�΅���(sh��)�ǽ��|�W(w��ng)ϵ�y(t��ng)����Ҫ��(sh��)��(j��),��Ҫ������(d��o)�ߺ�����ֵ,�քe����|���c�܉ƽ�洹ֱ���x,�Լ����|���c܉������ˮƽ���x[30] . ���|�W(w��ng)�΅���(sh��)�Ǻ������|�W(w��ng)�\(y��n)�Р�B(t��i)����Ҫָ��(bi��o),��Ӱ푹��W(w��ng)ƥ���P(gu��n)ϵ�Լ���܇��ȫ����Ҫ����,Ҳ�����P(gu��n)���T�M(j��n)�оS�o(h��)����Ҫ��������(j��). Ŀǰ,���|�W(w��ng)�΅���(sh��)�z�y(c��)������Ҫ������Ŀ���C(j��)�������pĿ���C(j��)�����ɷN.
������Ŀ���C(j��)����������һ��(g��)���C(j��)�z�y(c��)���|�W(w��ng)�΅���(sh��)[30-31] ,ͨ�^(gu��)�z��C(j��)�Ĕz���|�W(w��ng)ҕ�l,��(du��)��ҕ�l�е�ÿһ���D��,ͨ�^(gu��)�Ҷȷֲ��D�ȷ�ʽ�@ȡ���|��λ��,��Ӌ(j��)������������(bi��o). ���ˌ���������(bi��o)�D(zhu��n)�Q�Ɍ�(sh��)�H��������(bi��o)��Ҫ�M(j��n)�И�(bi��o)��,�����A(y��)���O(sh��)�óߴ���֪�Ę�(bi��o)����,ͨ�^(gu��)Ӌ(j��)���D(zhu��n)�Q�P(gu��n)ϵ�@ȡ���|�W(w��ng)��(sh��)�H�Č�(d��o)�ߺ�����ֵ��Ϣ. ��Ŀ���C(j��)�����D��@ȡ���,Ӌ(j��)������(du��)��(ji��n)��,�ɱ���,�����|����ˮƽλ�ý�(j��ng)��׃����(hu��)ʹ�Æ����C(j��)�Ĕ�(sh��)��(j��)�ɼ���������,��(sh��)�F(xi��n)܇�d��(sh��)�r(sh��)�z�y(c��)���y.
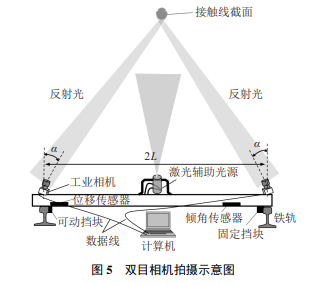
�����pĿ���C(j��)�������Ãɂ�(g��)���C(j��),�ڽ��|�W(w��ng)�ɂ�(c��)�քe�Ĕz���|��,��D5��ʾ[32] . ���O(sh��)�ú�ϵ�y(t��ng)����(sh��)��քe�Ĕz���|�W(w��ng)�D��,���@ȡ���|�W(w��ng)�����c(di��n)�����҈D���ϵ�����(bi��o),�M(j��n)��ϵ�y(t��ng)��(bi��o)����ͨ�^(gu��)������ԭ��Ӌ(j��)������|�W(w��ng)������(g��)ϵ�y(t��ng)�е����S��������(bi��o)[33-35] . �pĿ�����ă�(y��u)�c(di��n)���ڜy(c��)������Ѹ�ٜ�(zh��n)�_,�Ĕz�������V, ��(du��)�D��̎�������Ҫ�����,�m���Ը���. ����,ԓ������Ҫ���C���C(j��)���b����(sh��)�ľ���,�����ܵ����N�`���Ӱ�.
����1.2.2 ���|�W(w��ng)ĥ�ęz�y(c��)
�������|�W(w��ng)���鹭�W(w��ng)ϵ�y(t��ng)�ĺ��IJ���,���\(y��n)�I(y��ng)܇�v�����\(y��n)��(d��ng)�^(gu��)�����c��늹�̼����һֱ���ָ��ٽ��|Ħ����B(t��i),��(j��ng)�^(gu��)�L(zh��ng)���\(y��n)�н��|�W(w��ng)�ײ������|������������(hu��)���F(xi��n)ĥ��,��D6��ʾ. ����: r ����|�����돽, h ����|������, θ ��ĥ���c(di��n)�c�о��ĊA��. �c��늹�������ͬ,���|�W(w��ng)ĥ���^���(y��n)�ؕr(sh��)��(hu��)Ӱ푵�܉����ͨ���\(y��n)�I(y��ng),��Ҫ���r(sh��)�M(j��n)�и��Q. Ŀǰ,���ڙC(j��)��ҕ�X(ju��)�Ľ��|�W(w��ng)ĥ�ęz�y(c��)������Ҫ�֞�3�N,������Ŀ���C(j��)�������pĿ���C(j��)�����ͽY(ji��)��(g��u)��z�y(c��)����.ͨ��,��(d��ng)���|�W(w��ng)����ĥ�ĕr(sh��),��ײ���(hu��)���ڔ���, ���挦(du��)��ķ����ԱȌ�(d��o)������β���Ҫ��(qi��ng),����ڲɼ����ĈD����,���|��ĥ��߅����(hu��)�a(ch��n)�����@���ݶ�׃��,����ȡ���|��ĥ�IJ����ṩ�˿���. �īI(xi��n)[36] չʾ��һ�N���͆�Ŀ�z�y(c��)���|�W(w��ng)ĥ�ĵķ���,ͨ�^(gu��)��܇플�(du��)���|�W(w��ng)�D���M(j��n)���Ĕz,����(j��ng)�^(gu��)�D������(qi��ng)���D�������߅���z�y(c��)�Լ��ΑB(t��i)�W(xu��)̎������,��һ���D������ȡ��ĥ�IJ��ֵ�݆����Ϣ,�M(j��n)������ĥ�Ġ�r. ԓ�z�y(c��)����˼�뺆(ji��n)��,����(sh��)ʩ,���z�y(c��)�Y(ji��)���O���܅���(sh��)��(bi��o)���Y(ji��)����Ӱ�,����ԓ������(du��)�D��̎����Ҫ���^��,�����Բ�.
�����pĿҕ�X(ju��)�����چ�Ŀ���C(j��)�Ļ��A(ch��)������һ��(g��)���C(j��),�������C(j��)�քe�Ĕz�õ����|���D��. ��ϵ�y(t��ng)���텢��(sh��)�̶�����r��,����(j��)ϵ�y(t��ng)����(bi��o)�P(gu��n)ϵ�õ����|��ĥ������ij��(g��)�c(di��n)���������C(j��)����(bi��o)ϵ�µ�����(bi��o)��,�������dz���ԭ��������Ӌ(j��)���ԓ�c(di��n)����������(bi��o)ϵ�ϵ�����(bi��o). ��ȡ�����|��ĥ����߅����Ӌ(j��)��õ�ijһ����������߅��������(bi��o)����Ӌ(j��)��õ��@һ���|�������ĥ����r[37-39] . �pĿ���C(j��)����Ҳ��Ŀǰ���|�W(w��ng)ĥ�ęz�y(c��)����Ҫ����,��Ȇ�Ŀ���C(j��)�����z�y(c��)�Y(ji��)�������(zh��n)�_,һ���̶��ϱ����˅���(sh��)�^�y��(bi��o)���Ć�(w��n)�},���z�y(c��)�Y(ji��)����Ȼ���^��ه�D��̎�����g(sh��)��ȡ���|��߅��.
���������о���ֻ�ܵõ����|��ĥ�ĵĔ�(sh��)ֵ��Ϣ,�o(w��)���R(sh��)�e�����|��ĥ�ĵľ��w�ΑB(t��i). �īI(xi��n)[40]�����pĿ���w����ԭ��,��ȡ�����҈D���е�SURF�����M(j��n)�����wƥ��,�M(j��n)���õ����|����ҕ��D,�Ķ���(sh��)�F(xi��n)�˽��|����������S�ؽ�. ���ڈD��ƥ��ķ�ʽ��ه�ڈD����������ȡ,����Ӱ��^��,ʹ�ýY(ji��)��(g��u)��t���Ժܺõر����@һ��(w��n)�}. �īI(xi��n)[41-42]���Æ�Ŀ���C(j��)�;��Y(ji��)��(g��u)����Y(ji��)�ϵķ�ʽ,����(j��)���dz���ԭ��,��(j��ng)�^(gu��)�Y(ji��)��(g��u)��ƽ�慢��(sh��)��(bi��o)���Լ������l���ľ���ȡ,�@ȡ���|�W(w��ng)����ijһ��������S����(bi��o),ͨ�^(gu��)�؏�(f��)Ӌ(j��)��@ȡ����(g��)��������(bi��o),�M(j��n)һ����(sh��)�F(xi��n)���|�W(w��ng)��������S�ؽ�. ���ڽY(ji��)��(g��u)��ęz�y(c��)������(du��)�D��̎����Ҫ���^��, ͬ�r(sh��)����ںϵķ�ʽҲ��Ч�������ؽ��Y(ji��)��,��(sh��)�H�F(xi��n)��(ch��ng)��(y��ng)��Ч���д��M(j��n)һ���(y��n)�C,���g(sh��)����߀�кܴ�Ŀ��������g.
����1.2.3 ���|�W(w��ng)�Ғ첡���z�y(c��)
�������ٰl(f��)չ�ij���܉����ͨ��(du��)��܉����ͨ�\(y��n)���b�õİ�ȫ�z�y(c��)ͬ��Ҳ����˸��ߵ�Ҫ��. �ڱ����\(y��n)���b����,���|�W(w��ng)�Ғ��b���������܉����ͨ�\(y��n)�I(y��ng)܇�v�ṩ������P(gu��n)�I����O(sh��)��,��܉����ͨ�������ϵ�y(t��ng)���P(gu��n)�I�M�ɲ���. ��������,���|�W(w��ng)��Ҫ�֞����Խ��|�W(w��ng)�̈́��Խ��|�W(w��ng)�ɴ��. ���Խ��|�W(w��ng)һ���ڿ��g���܇��(ch��ng)��܇�v�εȸܾ�·����澀·ʹ��,�����Խ��|�W(w��ng)�ڳ���܉����ͨ��·�ĵ�� ^(q��)��ʹ��,���ڳ���܉����ͨϵ�y(t��ng)��ռ��(j��)��Ҫ����[43] .
�������Խ��|�W(w��ng)(��D7��ʾ)����(du��)�����Խ��|�W(w��ng)�����T����(y��u)�c(di��n),��S�o(h��)�z������,�ܘ�(g��u)���^��(ji��n)��,��ȫ����,�^�y�ྀ��[44-45] . ����,�ڐ������L(zh��ng)�����(d��ng)�Ĺ����h(hu��n)����,���׳��F(xi��n)���Խ��|�W(w��ng)��(d��o)������ϡ��R���Ÿ��g���R���žֲ���(y��n)��ĥ�p�ȹ���[46] . ���|�W(w��ng)�Ғ��b�õĹ��ό���(d��o)��ԓ��늷օ^(q��)ȫ��ʧȥ���,�^(q��)��(n��i)�����\(y��n)���е�܇�v��ʧȥ��(d��ng)��,�p�t�l(f��)��܇�vͣ�\(y��n),�t��ɽ�ͨ�¹�. ���,��(sh��)�r(sh��)��Ч�ؙz�y(c��)���|�W(w��ng)�Ғ��b�õ��\(y��n)�Р�B(t��i)�DZ���܉��܇�v�������\(y��n)�I(y��ng)����Ҫ��ʩ��——Փ�����ߣ�κ����† , �� �_(d��), κ���A, ��ԉ�(m��ng), ��˼�(y��ng), ������